Download
1 / 14
140 likes | 155 Views
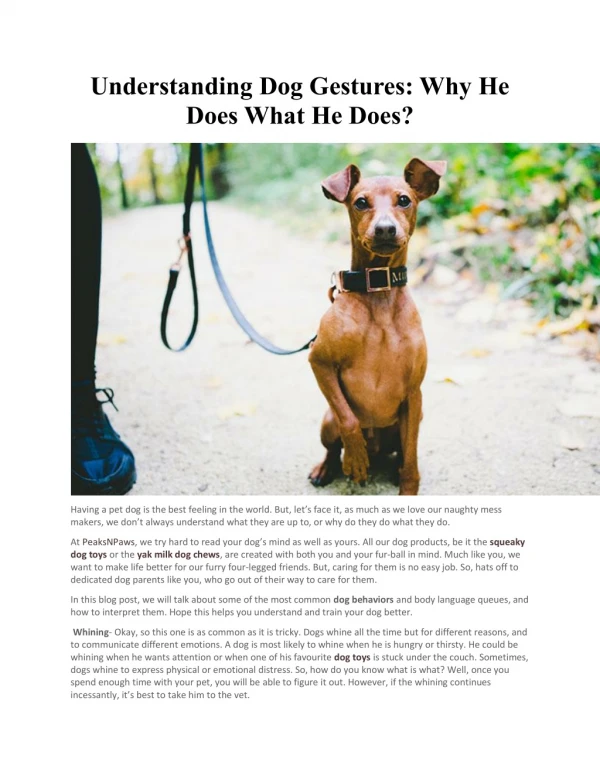
This tutorial provides an overview of GAMIT, a software used for geodetic analysis. It covers the email summary, output files, and common status files in GAMIT/GLOBK runs.

E N D
E-mail summary assessesover-all quality • Number of stations • Worst/best RMS scatter • postfit normalized RMS from solve • theoretically should be unity • typically around 0.2 • (daily position scatter in accord with sigma) • Large adjustments to site positions • Any fatal messages GAMIT/GLOBK Tutorial 4
Output files • Cleaning summary: • autcln.prefit.sum • autcln.post.sum -- Final postfit run • Solution files output by solve • qexpta.doy • human-readable • oexpta.doy • machine-readable • hexpta.yyddd • Full-precision for GLOBK suite GAMIT/GLOBK Tutorial 4
Status files common to all GAMIT/GLOBK runs • File names, e.g, GAMIT.fatal • One long line per event • Three levels of severity • Status • Time of steps in processing • Warning • Items that might be in error • Fatal • Errors so large that the processing stopped GAMIT/GLOBK Tutorial 4
Example GAMIT.status • STATUS :020119:1201: 6.0 ARC/aversn: Started ARC, \Version 9.53 of 2001/01/03 10:30:00 (Linux) • STATUS :020119:1201: 6.0 ARC/arc: Integrating \ • satellite 1 PRN 1 • STATUS :020119:1201: 6.0 ARC/arc: Integrating\satellite 2 PRN 2 • ....… • To watch progress as it happens: • tail -f GAMIT.status GAMIT/GLOBK Tutorial 4
Analyzing a solution: bias parameters • Number of biases fixed • Fixed bias have no sigmas in Q-file • 608 B1L1 SMYC-TBLE 4- 2 0.0000000000 10.0000 \ • 609*B1L1 SMYC-TBLE 4- 5 0.0000000000 2.3133 \ 0.0367 -2.31330402 • The * means not fixed and sigma is given • Adjustments • parameters should not change much GAMIT/GLOBK Tutorial 4
Analyzing a solution: adjustment sizes • Adjustments should not be too large • Convergence rate is 100 or 1000 to 1 • Suppose an adjustment of 1 m in position • residual error could be 1-10 mm • solution needs to be iterated • Atmospheric delay variations • Magnitude of gradients • EOP adjustments • Some examples (shown externally) GAMIT/GLOBK Tutorial 4
autcln output • autcln.out.Z • full output • automatically compressed • use uncompress or use zcat to view • Lists actions taken by autcln • autcln.prefit.sum • autcln.post.sum • Summaries • Look at these GAMIT/GLOBK Tutorial 4
autcln summary files • Clock & range stats from range data • Repeated twice since solution is iterated • List of double difference bias flags • Number of bias flags added to jumps in double differences • If too many flags are added, then autcln removes the site/satellite combination completely. This can happen if a satellite burns. Rare if IGS orbits are used since satellite is removed from orbit files. • Bad site coordinates can cause many bias flags GAMIT/GLOBK Tutorial 4
autcln summary file • One-way post-fit residual statistics • Only in postfit autcln summary • Gives RMS in mm • by station and each satellite for a station • Normal values are 3-10 mm • >10 mm is not good • sky plots show residuals • cview views residual time series interactively • reads C-files • default is to delete these files during batch runs) GAMIT/GLOBK Tutorial 4
Autcln summary file • AMS -- Averaged RMS of residuals • statistics for 25-point averages of residuals • theoretical white noise • should be 5X smaller than for single-point value • typically, though • AMS is 2X smaller than single point RMS • due to correlations in phase residuals • ratio of RMS/AMS • values to close to 1 mean systematic residuals GAMIT/GLOBK Tutorial 4
Autcln summary files • NUM • number of values used to compute RMS • ATELV • Elevation angle-dependence of RMS • fit to data noise model of the form • variance = A^2+(B/sin(elev))^2 • Sky-Plots • residuals v. elevation angle • show effects of multipath and antenna gain GAMIT/GLOBK Tutorial 4
Autcln summary: data amounts • Data counts by site and satellite: • N(good) • N(deleted) • N(bias flags) • ignoring rising satellites GAMIT/GLOBK Tutorial 4
Bias flag report • Reports number of bias flags added for • GAP -- Due to gap in data • JMP -- Large jump on phase-range difference • ION -- Ionospheric delay jump • DDS -- Double difference scanning • WLS -- Wide lane scanning • DDC -- Double difference jump while cleaning data GAMIT/GLOBK Tutorial 4