Download
1 / 1
10 likes | 337 Views
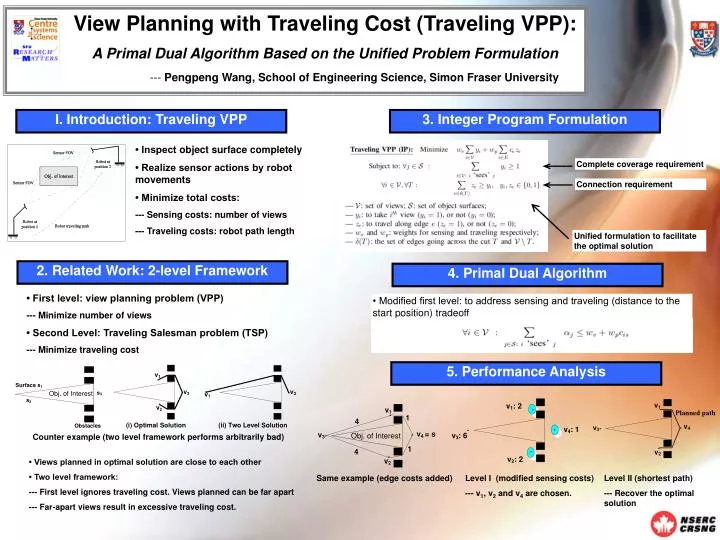
View Planning with Traveling Cost (Traveling VPP): A Primal Dual Algorithm Based on the Unified Problem Formulation --- Pengpeng Wang, School of Engineering Science, Simon Fraser University. I. Introduction: Traveling VPP. 3. Integer Program Formulation. • Inspect object surface completely

E N D
View Planning with Traveling Cost (Traveling VPP): A Primal Dual Algorithm Based on the Unified Problem Formulation --- Pengpeng Wang, School of Engineering Science, Simon Fraser University I. Introduction: Traveling VPP 3. Integer ProgramFormulation • Inspect object surface completely • Realize sensor actions by robot movements • Minimize total costs: --- Sensing costs: number of views --- Traveling costs: robot path length Complete coverage requirement Connection requirement Unified formulation to facilitate the optimal solution 2. Related Work: 2-level Framework 4. Primal Dual Algorithm • First level: view planning problem (VPP) --- Minimize number of views • Second Level: Traveling Salesman problem (TSP) --- Minimize traveling cost • Modified first level: to address sensing and traveling (distance to the start position) tradeoff 5. Performance Analysis Counter example (two level framework performs arbitrarily bad) • Views planned in optimal solution are close to each other • Two level framework: --- First level ignores traveling cost. Views planned can be far apart --- Far-apart views result in excessive traveling cost. Same example (edge costs added) Level I (modified sensing costs) --- v1, v2 and v4 are chosen. Level II (shortest path) --- Recover the optimal solution