Download
1 / 19
190 likes | 442 Views
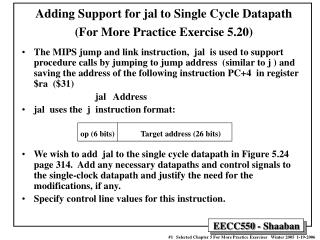
Chapter 5: Datapath and Control (Part 2). CS 447 Jason Bakos. Building a Datapath. Which components do we need for the A/L, load, and branch classes of MIPS instructions? First, we need a memory to hold our instructions

E N D
Chapter 5: Datapath and Control(Part 2) CS 447 Jason Bakos
Building a Datapath • Which components do we need for the A/L, load, and branch classes of MIPS instructions? • First, we need a memory to hold our instructions • Assume it has an address input, data output, and a MemRead and MemWrite control signals • A Program Counter (PC) register to hold the address of the next instruction • Typical register (clk, en, rst, D, and Q) • ALU (the one we built in Chap. 4) • A, B, ALUOp, and Out • Register file • Dual-port (ReadAddr1, ReadAddr2, WriteReg, WriteData, RegWrite, ReadData1, ReadData2) • Instruction Register • Like the PC, but holds the current instruction word
Datapaths • Assuming our instruction is already fetched, using our components we need to build datapaths for the following: • PC=PC+4 • Executing A/L R-type instruction and writing back result • Executing load/store effective address calculation • We need a sign extender for this • Computing a branch target address and determining whether or not a branch should be taken (for beq) • We need a sign extender and a 2-bit shifter for this
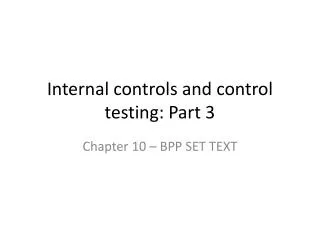
Datapaths PC+4 datapath R-type A/L datapath
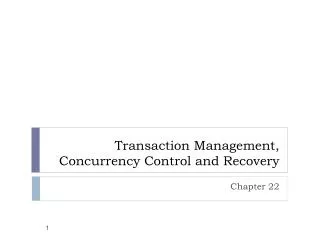
Datapaths Load/Store Datapath
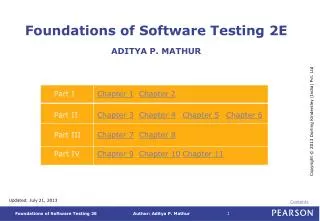
Datapaths Branch (beq) Datapath
Simple CPU Implementation • We want to implement the simplest possible implementation of our MIPS subset of instructions • lw/sw • beq • add, sub, and, or, and slt
Combining Datapaths • Let’s combine the datapaths that we looked at into a single datapath • Let’s assume that we want to execute all our instructions in a single clock cycle • This means that we can only use each datapath component once per instruction • We need a separate instruction and data memory • We may need to duplicate some components (but we can share components across different instruction types) • We need multiplexors for this
Integrated Datapaths • Here we combine all our datapaths • We also add our fetch hardware • Next we’ll need a control unit to assert the control signals
Control Signals • Recall the ALU control table… • Let’s create a small control “lookup table” for the ALU...
Control Signals • Note that ALUOp will come from the main control unit
Designing the Main Control Unit • First, let’s take a look at all our current control signals and their effect...
R-type Control • For an R-type instruction, let’s decide what needs to be done (note this is done in parallel) • Fetch instruction and increment PC by 4 • Read two registers • ALU does computation • Result is written back to register file
Load/Store Control • Let’s decide what needs to be done for a lw instruction • Fetch/increment PC • Read base register from reg. file • ALU computes effective address (base+offset) • Data from memory is written back to register file
Branch-on-Equal Control • Finally, let’s decide what needs to be done in order to perform the beq instruction • Fetch/increment PC • Read two registers • ALU subtracts • ALU computes effective branch target (PC+offset*4) • Zero result from ALU decides if we should write the new value to the PC
Control • Next time we’ll find out why a single-cycle CPU like this is not practical • We need a FSM to handle control in order to reuse components during a single instruction execution