Download
1 / 46
460 likes | 802 Views
Tracking. Overview and Mathematics. Tracking. Motivation. Technologies. Mathematics. Content. Motivation Technologies – Advantages and Disadvantages Common Problems and Errors Acoustic Tracking Mechanical Tracking Inertial Tracking Magnetic Tracking Optical Tracking

E N D
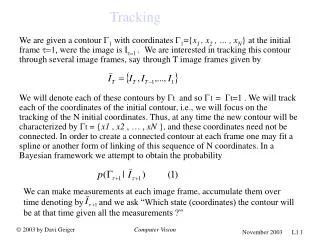
Tracking Overview and Mathematics
Tracking Motivation Technologies Mathematics Content • Motivation • Technologies – Advantages and Disadvantages • Common Problems and Errors • Acoustic Tracking • Mechanical Tracking • Inertial Tracking • Magnetic Tracking • Optical Tracking • Inside-out versus Outside-in • Mathematics • Transformations in the 2D-space • Transformations in the 3D-space • Discussion
Tracking Motivation Technologies Mathematics Motivation What is tracking? • The repeated localization of the position and orientation (pose) of one or several real physical objects Why is tracking needed in AR? • Integration of virtual objects into real world (images)
Tracking Motivation Technologies Mathematics Content • Motivation • Technologies – Advantages and Disadvantages • Common Problems and Errors • Acoustic Tracking • Mechanical Tracking • Inertial Tracking • Magnetic Tracking • Optical Tracking • Inside-out versus Outside-in • Mathematics • Transformations in the 2D-space • Transformations in the 3D-space • Discussion
Tracking Motivation Technologies Mathematics Common Problems and Errors • High update rate required (usually in real-time systems) • Dynamic tracker error, e.g. sensor‘s motion • Distortion due to environmental influences, e.g. noise • Long-term variations • Cause readings to change from one day to the next day
From [1] Tracking Motivation Technologies Mathematics Acoustic Tracking • The Geometry • The intersection of two spheres is a circle. • The intersection of three spheres is two points. • One of the two points can easily be eliminated. • Ultrasonic • 40 [kHz] typical (Slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)
Tracking Motivation Technologies Mathematics Acoustic Tracking - Methods • Time of Flight • Measures the time required for a sonic pulse to travel from a transmitter to a receiver. • d [m] = v [m/s] * t [s], v = speed of sound • Absolute range measurement • Phase Coherence • Measures phase difference between transmitted and received sound waves • Relative to previous measurement • still absolute!! (Slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)
Tracking Motivation Technologies Mathematics Acoustic Tracking – Discussion • Advantages • Small and lightweight (miniaturization of transmitters and receivers) • Only sensitive to influences by noise in the ultrasonic range • Disadvantages • Speed of Sound (~331 [m/s] in air at 0°C) • Varies with temperature, pressure and humidity • Slow Low update rate
From [1] From [1] Tracking Motivation Technologies Mathematics Mechanical Tracking • Ground-based or Body-based • Used primarily for motion capture • Provide angle and range measurements • Gears • Bend sensors • Elegant addition of force feedback (Slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)
Tracking Motivation Technologies Mathematics Mechanical Tracking – Discussion • Advantages • Good accuracy • High update rate • No suffering from environmental linked errors • Disadvantages • Small working volume due to mechanical linkage with the reference
Tracking Motivation Technologies Mathematics Inertial Tracking • Inertia • Rigidity in space • Newton’s Second Law of Motion • F = ma (linear) • M = I (rotational) • Accelerometers and Gyroscopes • Provide derivative measurements
From [1] Tracking Motivation Technologies Mathematics Inertial Tracking - Accelerometers • Measure force exerted on a mass since we cannot measure acceleration directly. • Proof-mass and damped spring • Displacement proportional to acceleration • Potentiometric and Piezoelectric Transducers (Slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)
Tracking Motivation Technologies Mathematics Inertial Tracking - Gyroscopes • Conservation of angular momentum • Precession • If torque is exerted on a spinning mass, its axis of rotation will precess at right angles to both itself and the axis of the exerted torque
From [1] Tracking Motivation Technologies Mathematics Inertial Tracking - Gyroscopes
From [1] Tracking Motivation Technologies Mathematics Inertial Tracking - Gyroscopes
Tracking Motivation Technologies Mathematics Inertial Tracking - Gyroscopes
Tracking Motivation Technologies Mathematics Inertial Tracking - Gyroscopes
Tracking Motivation Technologies Mathematics Inertial Tracking – Discussion • Advantages • Lightweight • No physical limits on the working volume • Disadvantages • Error accumulation due to integration (numerical) • Periodic recalibration • Hybrid systems typical • Drift in the axis of rotation of a gyroscope due to the remaining friction between the axis of the wheel and the bearings
Tracking Motivation Technologies Mathematics Magnetic Tracking • Three mutually-orthogonal coils • Each transmitter coil activated serially • Induced current in the receiver coils is measured • Varies with • the distance (cubically) from the transmitter and • their orientation relative to the transmitter (cosine of the angle between the axis and the local magnetic field direction) • Three measurements apiece (three receiver coils) • Nine-element measurement for 6D pose • AC at low frequency • DC-pulses (Parts of the slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)
Tracking Motivation Technologies Mathematics Magnetic Tracking – Discussion • Advantages • Small • Good update rate • Disadvantages • Small working volume • Ferromagnetic interference • Eddy currents induced in conducting materials Distortions Inaccurate pose estimates • Use of DC transmitters overcomes that problem • Sensitive to electromagnetic noise
From [1] Tracking Motivation Technologies Mathematics Optical Tracking • Provides angle measurements • One 2D pointdefines a ray • Two 2D pointsdefine a pointfor 3D position • Additional pointsrequired fororientation • Speed of Light • 2.998 * 108 [m/s] (Slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)
From [1] Tracking Motivation Technologies Mathematics Optical Tracking – Active Targets • Typical detectors • Lateral Effect PhotoDiodes (LEPDs) • Quad Cells • Active targets • LEDs
From [1] Tracking Motivation Technologies Mathematics Optical Tracking – Passive Targets • Typical detectors • Video and CCD cameras • Computer vision techniques • Passive targets • Reflective materials, high contrast patterns
From [A.R.T. GmbH] Tracking Motivation Technologies Mathematics Optical Tracking – Passive Targets
Tracking Motivation Technologies Mathematics Optical Tracking – Discussion • Advantages • Good update rate (due to the speed of light) • Well suited for real-time systems • Disadvantages • Accuracy tends to worsen with increased distance • Sensitive to optical noise and spurious light • Can be minimized by using infrared light • Ambiguity of surface and occlusion
From [3] Tracking Motivation Technologies Mathematics Inside-out versus Outside-in • Inside-out
From [3] Tracking Motivation Technologies Mathematics Inside-out versus Outside-in • Outside-in
Tracking Motivation Technologies Mathematics Content • Motivation • Technologies – Advantages and Disadvantages • Common Problems and Errors • Acoustic Tracking • Mechanical Tracking • Inertial Tracking • Magnetic Tracking • Optical Tracking • Inside-out versus Outside-in • Mathematics • Transformations in the 2D-space • Transformations in the 3D-space • Discussion
From [1] Tracking Motivation Technologies Mathematics Position and Orientation (Pose) • Representation • x, y, z (position) and , , (orientation) • with respect to a given reference coordinate system
Y 2 1 X 2 3 1 Tracking Motivation Technologies Mathematics Transformations in the 2D-space • Translation
Y 2 1 X 2 3 1 Tracking Motivation Technologies Mathematics Transformations in the 2D-space • Scale
Y Y 2 1 X X 2 3 1 Tracking Motivation Technologies Mathematics Transformations in the 2D-space • Rotation
From [1] Tracking Motivation Technologies Mathematics Transformations in the 2D-space • Scale and Rotation can be combined by multiplication of their matrices • Translation cannot be combined with them by multiplication • Introduction of Homogeneous Coordinates
Tracking Motivation Technologies Mathematics Transformations in the 2D-space
Tracking Motivation Technologies Mathematics Transformations in the 3D-space • Translation
Tracking Motivation Technologies Mathematics Transformations in the 3D-space • Scale
Tracking Motivation Technologies Mathematics Transformations in the 3D-space • Rotation
Tracking Motivation Technologies Mathematics Transformations in the 3D-space • e.g. Rotation through about the z axis
Tracking Motivation Technologies Mathematics Transformations in the 3D-space • Rotation-Sequences • Concatenation of several rotations • Can be performed by using • Rotation matrices (matrix multiplication) • Euler-angles • Quaternions
Tracking Motivation Technologies Mathematics Transformations in the 3D-space • Euler-angles • Three angles , and • Each represents a rotation about one of the coordinate axes (X, Y and Z). • Gimbal Lock • Ambiguities • R(, 0, 0) = R(0, , )
Tracking Motivation Technologies Mathematics Transformations in the 3D-space • Quaternions • Unit Quaternions • A unit quaternionrepresents a rotation about the axisthrough the angle
Tracking Motivation Technologies Mathematics Transformations in the 3D-space • Multiplication-operator for quaternions: • The result is a rotation p composed by the rotations q and r.
Tracking Motivation Technologies Mathematics Transformations in the 3D-space • Advantages of quaternions: • No gimbal lock • Unique representation of a rotation • Interpolation can be properly carried out(spherical interpolation on the 4-sphere; Shoemake, 1985) • Rotation-sequences can be easily performed
Tracking Motivation Technologies Mathematics Conclusion • Each tracking technology has advantages and disadvantages • Multi-Sensor-Fusion for minimizing the measurement errors • Transformations in the 3D-space have to be handled with care
Tracking Motivation Technologies Mathematics Thank you for your attention! Any questions?
Tracking Motivation Technologies Mathematics References: [1] G. Bishop, G. Welch and B. D. Allen, „Tracking: Beyond 15 Minutes of Thought”, SIGGRAPH 2001 Course Notes, University of North Carolina at Chapel Hill [2] G. Bishop, G. Welch and B. D. Allen, „Tracking: Beyond 15 Minutes of Thought”, SIGGRAPH 2001 Course Slides, University of North Carolina at Chapel Hill [3] Ribo, Miguel, “State of the Art Report on Optical Tracking”, 2001