Download
1 / 37
370 likes | 471 Views
Delve into strategies for uncertain problems, optimizing resources & costs when faced with unknown future data. Explore various scenarios and approaches for stochastic combinatorial optimization problems.

E N D
On the Cost and Benefits of Procrastination: Approximation Algorithms for Stochastic Combinatorial Optimization Problems (SODA 2004)Nicole Immorlica, David Karger, Maria Minkoff, Vahab S. Mirrokni Jaehan Koh (jaehanko@cs.tamu.edu) Dept. of Computer Science Texas A&M University
Outline • Introduction • Preplanning Framework • Examples • Results • Summary • Homework
Introduction • Scenarios • Harry is designing a network for the Computer Science Department at Texas A&M University. In designing, he should make his best guess about the future demands in a network and purchase capacity in accordance with them. • A mobile robot is navigating around a room. Since the information about the environment is unknown or becomes available too late to be useful to the robot, it might be impossible to modify a solution or improve its value once the actual inputs are revealed.
Planning under uncertainty • Problem data frequently subject to uncertainty • May represent information about the future • Inputs may be evolve over time • On-line model • Assumes no knowledge of the future • Stochastic modeling of uncertainty • Given: probability distribution on potential outcomes • Goal: minimize expected cost over all potential outcomes
Approaches • Plan ahead • Full solution has to be specified before we learn values of unknown parameters • Information becomes available too late to be useful • Wait-and-See • Possibility to defer some decisions until getting to know exact inputs • Trade-off: decisions made late may be more expensive
Approaches (Cont’d) • Trade-offs • Make some purchase/allocation decisions early to reduce cost while deferring others at greater expense to take advantage of additional information. • Problems in which the probolem instance is uncertain. • Min-cost flow, bin packing, vertex cover, shortest path, and the Steiner tree problems.
Preplanning framework • Stochastic combinatorial optimization problem • ground set of elements e E • A (randomly selected) problem instance I, which defines a set of feasible solutions FI, each corresponding to a subset FI 2E. • We can buy certain elements “in advance” at cost ce, then sample a problem instance, then buy other elements at “last-minute” cost ce so as to produce a feasible solution SFI for the problem instance. • Goal: to choose a subset of elements to buy in advance to minimize the expected total cost.
Two types of instance prob. distribution • Bounded support distribution • Nonzero probability to only a polynomial number of distinct problem instances. • Independent distribution • Each element / constraint for the problem instance active independently with some probability.
Versions • Scenario-based • Bounded number of possible scenarios • Explicit probability distribution over problem instances • Independent events model • Random instance is defined implicitly by underlying probabilistic process • The number of possible scenarios can be exponential in the problem size
Problems • Min Cost Flow • Given a source and sink and a probability distribution on demand, buy some edges in advance and some after sampling (at greater cost) such that the given amount of demand can be routed from source to sink. • Bin Packing • A collection of item is given, each of which will need to be packed into a bin with some probability. Bins can be purchased in advance at cost 1; after the determination of which items need to be packed, additional bins can be purchased as cost > 1. How many bins should be purchased in advance to minimize the expected total cost?
Problems (Cont’d) • Vertex Cover • A graph is given, along with a probability distribution over sets of edges that may need to be covered. Vertices can be purchased in advance at cost 1; after determination of which edges need to be covered, additional vertices can be purchased at cost . Which vertices should be purchased in advance?
Problems (Cont’d) • Cheap Path • Given a graph and a randomly selected pair of vertices (or one fixed vertex and one random vertex), connect them by a path. We can purchase edge e at cost ce before the pair is known or at cost ce after. We wish to minimize the expected total edge cost.
Problems (Cont’d) • Steiner Tree • A graph is given, along with a probability distribution over sets of terminals that need to be connected by a Steiner tree. Edge e can be purchased at cost ce in advance or at cost ce after the set of terminal is known.
Preplanning combinatorial optimization problem • A ground set of elements e E, a probability distribution on instances {I}, a cost function c: E R, a penalty factor 1 • Each instance I has a corresponding set of feasible solutions FI 2E associated with it. • Suppose a set of elements AE is purchased before sampling the probability distribution. The posterior cost function cA is defined by
Preplanning combinatorial optimization problem (Cont’d) • The objective of a PCO problme: choose a subset of elements A to be purchased in advance so as to minimize the total expected cost of a feasible solution over a random choice of an instance I.
The Threshold Property • Theorem 1. • An element should be purchased in advance if and only if the probability it is used in the solution for a randomly chosen instance exceeds 1/.
Example: Min-cost Flow • We wish to provide capacity on a network sufficient to carry a random amount of flow demand D from a source s to a sink t. • We have an option to pre-install some amout of capacity in advance at some cost per unit. • We rent additional capacity once the demands become known, but at cost a factor of or larger per unit. • The sum of capacity in advance and capacity rented must satisfy a given upper bound of total capacity for each edge. • Goal: Over a given probability distribution on demands, minimize the expected cost of installing sufficient capacity in the network so that the network satisfies the demand.
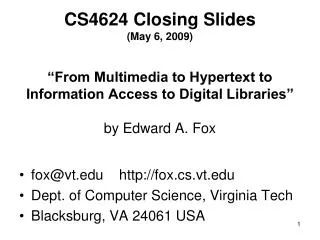
3 1 a 1 s t 3 1 b Example: Min-cost Flow (Cont’d) • Suppose • Cap(s-a) = Cap(a-t) = Cap(s-b) = Cap(a-b) = Cap(b-t) = 1 • = 2 • Pr[D=0] = ¼, Pr[D=1] = ¼, Pr[D=2] = ½
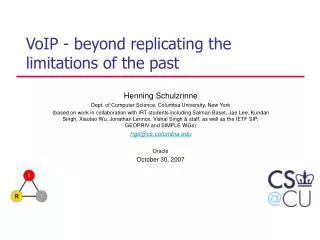
3 1 a 1 s t 3 1 b Example: Min-cost Flow (Cont’d) • Suppose • Cap(s-a) = Cap(a-t) = Cap(s-b) = Cap(a-b) = Cap(b-t) = 1 • = 2 • Pr[D=0] = 5/12, Pr[D=1] = ¼, Pr[D=2] = 1/3
Example: Vertex cover • Classical vertex cover problem • Given: a graph G = (V, E) • Output: a subset of vertices such that each edge has at least one endpoint in the set • Goal: minimize cardinality of the vertex subset • Stochastic vertex cover • Random subset of edges is present • Vertices picked in advance cost 1 • Additional vertices can be purchased at cost >1 • Goal: minimize expected cost of a vertex cover • Time-information trade-off
Our techniques • Merger of Linear Programs • Easy way to handle scenario-based stochastic problems with LP-formulations • Threshold Property • Identity elements likely to be needed and buy them in advance • Probability Aggregation • Cluster probability mass to get nearly deterministic subproblems • Justifies buying something in advance
Vertex Cover with preplanning • Given • Graph G = (V, E) • Random instance: a subset of edges to be covered • Scenario-based: poly number of possible edge sets • Independent version: each e E present independently with probability p. • Vertices cost 1 in advance; after edge set is sampled • Goal: select a subset A of vertices to buy in advance such that minimize expected cost of a vertex cover
Idea 1: LP merger • Deterministic problem has LP formulation • Write separate LP for each scenario of stochastic problem • Take probability-weighted linear combination of objective functions • Applications of scenario-based vertex cover • VC has LP relaxation • Combine LP relaxation of scenarios • Round in standard way • Result: 4-approximation
Idea 2: Threshold property • Buy element e in advance Pr[need e] 1/ • Advance cost ce • Expected buy-later cost cePr[need e] • Application of independent-events vertex cover • Threshold degree k = 1/p • Vertex with degree k is adjacent to an active edge with probability 1/ • Not worth buying vertices with degree < k in advance • Idea: purchase a subset of high degree vertices in advance
k-matching • k-matching is a subset of edges that induces degree k on each vertex • Vertex v V is tight if its degree in matching is exactly k • Can construct a maximal k-matching greedily
Algorithm for k-matching • Assume 4 • Set k = 1 / p • Construct some maximal k-matching Mk • Purchase in advance the set of tight vertices At • Solution cost • Prepurchase cost | At | • “Wait-and-See” cost • expected size of minimum vertex cover of active edges not already covered by At
Bounding 2nd stage cost • Claim: once purchased all the tight vertices, it is optimal to buy nothing else in advance • Vertices in At cover all edges not in k-matching, then e has at least one tight endpoint • Vertices not in At have degree < k • E[cost] a vertex cover in V \ At-induced subgraph is at most OPT
Bounding prepurchase cost • Restrict attention to instnace induced by Mk • Costs no more than OPT • Intuition • Vertex of degree k = 1/p is likely to be adjacent to an active edge • Active edges are not likely to be clustered together • Can show that a tight vertex is useful for the vertex cover with sufficiently high probability | At | = O(OPT)
Steiner network preplanning • Given • Undirected graph G = (V, E) with edge costs ce 0 • Probability pi of node i becoming active • Penalty 1 • Goal • Buy subset of edges in advance in order to minimize expected cost of s Steiner tree over active nodes • Approaches: probability aggregation • Cluster vertices into groups of 1/ probability • Purchase in advance edges of an MST over clusters
CLUSTER algorithm • The Steiner tree for the ultrametric case • An assignment of edge weights satisfying ĉuv max (ĉu, ĉv). • The basic idea • To cluster nodes into components, each containing clients of total probability mass (1/). • Lemma • Algorithm CLUSTER produces an MST with the specified properties.
<T <T <T <T CLUSTER algorithm (Cont’d) • A hub tree h h >T >T
Probability Aggregation 1/ 1/ p p p p 1/ p p p p p p p p p p 1/ p p 1/ p p p p p p p p p
Summary • Stochastic combinatorial optimization problems in a novel “preplanning” framework • Study of time-information trade-off in problems with uncertain inputs • Algorithms to approximately optimize the choice of what to purchase in advance and what to defer • Open questions • Combinatorial algorithms for stochastic min-cost flow • Metric Steiner tree preplanning • Applying preplanning scheme to other problems: scheduling, multicommodity network flow, network design
Homework • (40 pts) In the paper, the authors argue that we can reduce the preplanning version of an NP-hard problem to solve a preplanning instance of another optimization problem that has a polynomial-time algorithm. Explain in your own words why this is true and give at least one example. • (a) (30 pts) Formulate the Minimum Steiner Tree problem as an optimization problem (b) (30 pts) Reformulate the Minimum Steiner Tree problem in a PCO (Preplanning Combinatorial Optimization) problem version. Explain the difference between (a) and (b).
Thank you … • Any Questions?