Download
1 / 33
370 likes | 1.07k Views
Finite Element Analysis. Basic Theory Introduction. Overview. What is a Finite Element? Common terminology Elements Constraints Loads Analysis types Units. What is a Finite Element?.

E N D
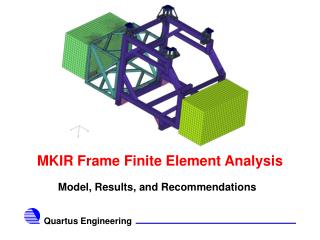
Finite Element Analysis Basic Theory Introduction
Overview • What is a Finite Element? • Common terminology • Elements • Constraints • Loads • Analysis types • Units
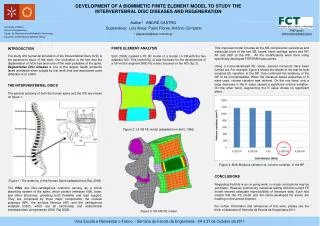
What is a Finite Element? • It is a mathematical model that interpolates displacements of points in space to get displacements anywhere in the domain of the element. • Because of the nature of the interpolation functions, a the gradient of the displacement field is continuous, meaning that a continuous strain field is implied.
What is a Finite Element? • In other words, the strain field in an element is continuous. This indirectly means that the stress field is continuous in an element • Elements next to each other do not share any information about their interpolation methods, so the strain, and therefore stress field at element boundaries are almost always discontinuous
What is a Finite Element? • In a typical first-order quad-element, strain can vary linearly across an element. • This capability is used to model more complex stress fields by using a series of linear approximations to model a nonlinear stress-field. In general, the more elements, the better the approximation
What is a Finite Element? • It’s already said that the stresses across element boundaries are not continuous. What now? We simply average the values at the nodes. • Isn’t this dangerous? Yes it is: If the mesh is not fine enough to accurately represent the stress state. • The error at the nodes can however also be used to check for convergence of the mesh: A small error (ie. (max predicted) – (min predicted) ) gives a good indication that the mesh has converged. • This brings us to one of the most important concepts in Finite Elements: Mesh Convergence
What is a Finite Element? • A mesh is converged if it is able to represent the stress-state of a component with the required level of accuracy. • Mesh Convergence has absolutely nothing to do with convergence settings in Non-linear analysis! Both are needed for Non-linear analysis, while only Mesh convergence are required for linear analysis • A linear analysis has a linear relationship between forces, displacements and stresses. • A nonlinear analysis has a nonlinear relationship between forces and displacements due to nonlinear material properties, large rotations, loads changing as the structure deforms or if boundary conditions are dependent on displacements. Convergence for a non-linear analysis has to do with the difference between the applied load and the reaction-forces generated by the elements.
Common Terminology • Node: A point in space that is used to connect the elements to. Loads / Boundary conditions can only be applied to nodes. Even pressure values or gravitational loads are reduced to loads at nodes by the finite element solver. • DOF (Degree of Freedom): This is the displacement of a Node • Element stiffness matrix: The matrix that maps forces at nodes to displacements at the nodes of an element • Global stiffness matrix: The assembled matrix that contains the stiffness of each element in the model, thereby having the stiffness of each node • Constraint: Applying an enforced motion (zero or otherwise) to a node. This is the same as connecting an infinite stiffness at this node.
Common Terminology • Plane stress element: A thin element that can only move in a plane. The stress normal to the element is zero. Used to model thin structures loaded in 2D • Plane strain element: An element that is constrained in it’s thickness direction. The strain normal to the element is zero. Used to approximate thick structures loaded in 2D • Rigid body mode: The ability of a body to move in space without generating stresses. A model without any constraints can move in 6 directions without generating strain. NO rigid body modes are allowed in a static analysis. Why?
Elements • Solid elements have only translational DOF at each node. A solid element is able to translate or rotate by only translating the nodes. • Because the element has the ability to generate internal moments by applying a couple, no rotational DOF are needed. • Constraining the rotational DOF of a solid element will have EXACTLY ZERO EFFECT
Elements • Shell elements usually have 5 DOF at each node: 3 Translations and 2 Rotations. Some Finite Element implementations actually has a third rotation as well, but it is not a necessity to have it to be able to fully load such an element. • Shell elements do not have nodes spaced apart in the thickness direction to be able to apply a couple. Therefore, rotational DOF are needed to be able to bend a shell element out-of-plane. • In-plane bending is possible using only forces because of the possibility of applying a couple. It is this rotational DOF about the normal to the shell that is commonly neglected in element formulations
Elements • Beam elements has 6 DOF per node: Three translations and three rotations. • Without the 3 rotational DOF, the element would not be able to load or constrain the two bending directions or to apply a torque. • Special cases exist like a truss element (Only axial- and torque stiffness) and Cable elements (only tension stiffness, no compression stiffness)
Elements • Second order elements gives more accurate answers than first order elements in most cases. They are a lot more expensive in computer resources, so they end up being selectively used • One important thing to remember about second order elements is that they are a lot more sensitive to distortion than their first-order equivalents
Elements • First order Tri and Tet elements have a constant stress state, while First order Quad and Hex elements has a Linear stress distribution. • This means that first order Tri and Tet elements do a really bad job of representing a linear stress gradient as found in bending problems, while Quads and Hexes can (in theory at least) represent it with a single element.
Elements • Second order Tri and Tet elements has an accuracy very similar to that of first order Quad and Hex elements. • Their drawback is the large increase in number of nodes for the same accuracy.
Elements A factor that impacts element-choice for an analysis is how easy it is to create a mesh using that type of element. Meshing of Curves into beam elements is trivial It is also easy to mesh surfaces to get Tri or Quad elements. Getting a good mesh may take a bit longer when you need to specify where to refine a model. Meshing solid elements into Tet elements is simple. To generate a hex-mesh takes a lot longer because there is no consistent way to mesh complex solids with good-quality Hex elements.
Elements • This brings us to the most important question in meshing: What element should I use? • The answer is very simple: The simplest element that will answer the question that I have!
Elements • Using too complex an element for the required job leads to a severe penalty in runtime and resource-usage • Imagine modeling a Crane using solid elements. Of course it does not make sense. Beams do a much better job by being able to use a lot less elements to get the forces and moments. Catalogues exist that tells you what the force- and moment-handling capabilities of beams are, so in a lot of cases you may not even care what the stress is in the model!
Elements • What happens to the connections between beams? Can beam elements model this accurately? No, of course not. The beam mesh models a “perfect” load-transfer path from one beam to the next, but no local stress-distribution are taken into account. • For this, a shell model may be more appropriate. The loads found by a beam model is applied to a shell-element sub-model to find the local stresses and stiffness of the connection.
Elements • Solid elements are used when there are significant through-thickness stresses at some location. This happens at each location where the thickness changes • Take note: Even though a structure is made up of plates, it does not mean that shell elements are the correct choice! If the ratio of the plate thickness to the other dimensions of the plate is too small, the through-thickness stress becomes very significant. • A ratio of 1:10 is about the limit for any kind of accuracy for Thin-Shell elements and 1:5 for thick shells. More sensible would be 1:20 and 1:10. The difference between thin- and thick-shell elements is that thin shells ignores through-thickness shear stiffness, while thick-shells include them. Recommendation: Always use thick shell elements as they will give more accurate answers. They take slightly longer to run, which is their only “drawback”
Elements Further recommendations: • Use Quad elements rather than Tri elements • Use first order elements unless it is Tri or Tet elements • Use Hex elements if • Computer resources are a problem (Not enough disk / Memory) • The meshing-time will be less than the run-time (Nonlinear analysis having to perform thousands of iterations) • Use second order Tet elements for most cases where an answer is needed quickly for linear analysis. They are about as accurate a Hex-8 element but takes a lot less time to mesh a complex structure. It’s also easy to check convergence: Simply re-mesh and re-run.
Constraints • Constraints are there to generate reaction forces that balances the applied loads • In a static analysis, the minimum number of DOF that needs to be constrained (even for an unloaded model) is 6: The model may not be able to rotate or displace without reaction forces being generated.
Constraints • There are two types of constraints: • An SPC (Single-point constraint) is a constraint equation that prescribes the motion of a single node • An MPC (Multi-point constraint) is a constraint equation that links DOF with a linear equation. This makes possible modeling a lever action between two nodes (Displacement 1 = 10* Displacement 2) or rigid connection between nodes (Displacement 1 = Displacement 2). • A series of “rigid” elements are implemented in most FEA codes that defines the coefficients of the MPC constraint equations implicitly. This makes it a lot easier to use them. • In Nastran, the “R” type elements are implemented through MPC equations. The RBE2 element is a Rigid connection, while the RBE3 is an averaging connection. • SPCs are easy to use and to understand the implications of applying them. • “R” type elements are more difficult to use, but mostly still straightforward. • Explicit MPCs can be very difficult to use, and it’s very easy to make a severe modeling mistake.
Constraints • In practice, SPCs are used to represent the connection to the rest of the universe. Think very carefully before applying a constraint: • Is the part of the structure you’re replacing with SPCs really infinitely stiffer then the part you are modeling? If not, at least the answers at the SPCs will be wrong. Further away it may be correct assuming the constraints are equivalent • Does the structure want to deform in a way in real life that the constraint does not allow? • Stress concentrations occur where parts of different stiffness are connected together. Because an SPC is infinitely stiff, the stress-concentration effect is extreme. Therefore, except where the constraints exactly model a physical phenomenon, the results at a constraint will be wrong. • The same goes for MPCs: Remember that they are infinitely rigid, thereby causing severe stress-concentrations. They can also severely affect the load-path because of the severe stiffness.
Constraints • Symmetry is used where both the loads and the structure have mirror symmetry. Anti-symmetry can also be used to advantage • Advantages: • Less computer resources are needed for a symmetry model than a full model • Boundary conditions are greatly simplified. The symmetry constraints removes certain rigid body modes without introducing any artificial stiffness • Disadvantages: • Symmetry is slightly more difficult to interpret than a full model • Very difficult to present results to non-technical people (especially anti-symmetry!).
Loads • Loads applied can be point-, edge, face or body loads. • To apply a load that is not impossible to re-create in real life, a Force per unit area (pressure loading) or Force per unit volume (inertial loading) must be applied.
Loads • To generate a “pressure” type loading an Area is needed for the load to act on: • For solid elements, this can only be a pressure load to have an area over which to act • For the shells, it needs at least a load per unit length because the shell has thickness defined already. (Thickness * Length = Area for load to act) • Beam elements has cross-sectional Area. Therefore a point load can be applied to a beam without a stress-concentration: The load is effectively distributed evenly over the whole cross-sectional area
Loads • The meaning of a point load applied to a shell- or solid element is actually a pressure load on the element that varies across the element. Therefore, the finer the mesh, the higher the stress: The load is distributed over a smaller area • Exactly the same is true for a constraint: It is effectively smeared across an element.
Analysis types • Static analysis: • A static analysis is useful to model a structure where the loading is applied slow enough so that dynamic effects are not excited. If a structure is loaded at a frequency of about 1/3 of it’s first mode, a static analysis can be performed with good results. • The model must be fully constrained (No rigid body modes) • Mass is only needed if inertial (gravity) loading is applied • It’s the most common type of analysis performed. The key requirements of a good static analysis are: • A converged mesh (Relatively easy) • Sensible constraints (Requires careful thought) • Correct loading (Sometimes difficult to obtain) • Good material properties (Usually easy)
Analysis types • Modal analysis: Used to find the un-damped modes of a structure • There are no loads in a modal analysis, only boundary conditions. For the analysis to run, boundary conditions are not a requirement, but unless it is an aero-plane or a satellite, constraints needs to be used. • The model must have mass and stiffness! • Stresses can be requested. Yes they have meaning, but NOT to determine if the structure will fail or not. The eigen-vectors (mode-shapes) reported by the FEM code are arbitrarily scaled. The stress corresponds to this scaled deformation shape. Nothing more, nothing less. If you make a change to a model and the modal stress comes down, it does NOT mean it is a better design! • Buckling analysis: Used to find the scale factors for all the applied loads for the structure to become unstable • Buckling loads for some structures are extremely sensitive to the initial shape. No structure is perfect, so introduce small imperfections into the model to determine how sensitive your model is to initial shape. • One way to do this is to run a buckling analysis on the perfect shape, then to offset the mesh with the buckling shape within manufacturing tolerances, and then to re-run the analysis
Analysis types • Frequency response: This is a transfer-function between input loads and every node in the model • Transient dynamic: • Similar to a static analysis, but with dynamics starting to play a role. • Model should have mass, otherwise no dynamics wil be present. • No constraints are needed for the analysis to run because the inertia of the structure can balance the applied loads
Units • FEA codes uses a set of consistent units. This means that basic equations such as F=m*a should hold for the units chosen. • SI is a consistent set of units and it is strongly advised that it be used.
Units • A seemingly attractive set of Engineering units is based on mm-N-s, which has pressures (stresses) in MPa, velocity in mm/s, acceleration in mm/s^2 etc. • The catch is that mass is in Mg (tons) and density in Mg/mm^3! • Units for thermal analysis are even more involved. It is very easy to make a mistake during the process of calculating the correct units and the required scale factors. • Having consistent units for any dynamic-type of analysis is especially important. Be very careful when not using SI!