Download
1 / 10
100 likes | 259 Views
Learn the Gauss Elimination method for solving systems of equations efficiently with step-by-step instructions and example calculations. Contact: peep.miidla@ut.ee

E N D
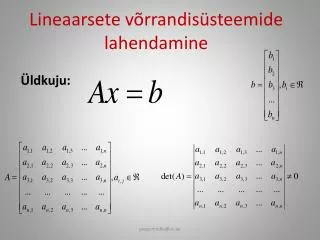
Lineaarsete võrrandisüsteemide lahendamine Üldkuju: peep.miidla@ut.ee
Gaussi elimineerimismeetod I Algoritm 1. Et lahendada võrrandite süsteem A*x = b Gaussi elimineerimismeetodiga , tuleb • FaktoriseeridaA, A = P*L*U , kus P on permutatsioonimaatriks, L on ühtedest koosneva diagonaaliga alumine kolmnurkne maatriks ja U on mittesingulaarne ülemine kolmnurkmaatriks. • Lahendada süsteem P*L*U*x= b vektori L*U*xsuhtes, permuteerides vektori b komponendid. • Lahendada süsteem L*U*x = P-1*b vektori U*x suhtes, • U*x= L-1*(P-1*b) (forwardsustitution). • Lahendada süsteem U*x= L-1*(P-1*b) vektori x suhtes, x = U-1*(L-1*P-1*b) (backwardsubstitution). Tehete arv Gaussi elimineerimismeetodi korral: n3 /3 *(n2+3*n-1) peep.miidla@ut.ee
Maatriksi faktoriseerimine peep.miidla@ut.ee
Gaussi elimineerimismeetod II • Def. Permutatsioonimaatriksiks nimetatakse maatriksit P, mis saadakse ühikmaatriksist ridade vahetamise (permuteerimise) tagajärjel. Lemma Olgu P1, P2 ja Ppermutatsioonimaatriksid (dimensiooniga n*n). Siis • P*X on maatriks, mis saadakse maatriksist X selle ridade vahetamise teel ja X*P on sama veergude vahetamise järel. • P-1 = PT . • det(P ) = ± 1 . • P1 * P2on samuti permutatsioonimaatriks. peep.miidla@ut.ee
Maatriksite faktoriseerimine • TEOREEM. Kui n*n maatriks A ei ole singulaarne,siis leiduvad permutatsioonimaatriks P (ühikmaatriks, mille read on vahetatud), mittesingulaarne alumine kolmnurkmaatriks L ja mittesingulaarne ülemine kolmnurkmaatriks U sellised, et A=P*L*U. • Süsteemiga A*x = b ekvivalentset süsteemi P*L*U*x = b lahendatakse sellises järjekorras: L*U*x = P-1*b = PT*b(vahetatakse b komponendid); U*x = L-1*(PT*b) (forwardsubstitution); x = U-1*(L-1*PT*b) (backsubstitution). peep.miidla@ut.ee
Gaussi elimineerimismeetod III Peaelementide väljaeraldamine (pivoting) • Osaline peaelementide kasutamine (partial pivoting). Kasutatakse suurimat elementi igas veerus; L*U = P*A. [Kasutab MATLAB] • Täielik peaelementide kasutamine (complete pivoting). Leitakse igal elimineerimissammul suurim element kogu maatriksis; L*U = P*A*Q. • Peaelemente ei eraldata välja; erijuhtudel. peep.miidla@ut.ee
Gaussi elimineerimismeetod IV Juhud, mil ei ole vaja juhtelemente välja eraldada: • Kui maatriks A on domineeriva peadiagonaaliga: • Kui maatriks A on positiivselt määratud: AT = A ; x*A*xT > 0 iga x korral peep.miidla@ut.ee
Näide Maatriksi LU faktoriseering: Teeme läbi Gaussi elimineerimismeetodi peaelementi välja eraldamata. Esialgu ε väike arv. Kui võtta ε väga väikeseks, ε < εmach ≈ 2-53 , siis saame lahendiks x1 = x2 = 1. peep.miidla@ut.ee
Gaussi elimineerimismeetod, kolmnurksele kujule viimine Lahend: Rida2-3*Rida3, 2*Rida3-Rida1 Rida3/11, 10*Rida3+Rida2 Süsteem on kolmnurksel kujul, tehakse tagasisamm. peep.miidla@ut.ee
Gauss-Jordani elimineerimismeetod Lahend: R2-2*R3, 3*R3-R1 -R3/8, R2+4*R3 5*R2+7*R3, R2R3 R2/5, R1-4*R2 R1-R3 R1/3 Süsteemi maatriks on viidud diagonaalkujule peep.miidla@ut.ee