Gap Acceptance at Unsignalized Intersections: Critical Factors in Traffic Flow and Control
310 likes | 417 Views
This presentation explores gap acceptance models at unsignalized intersections, focusing on stop and yield controlled scenarios, TWSC, AWSC, and roundabouts. It covers key concepts such as critical gaps, follow-up times, and impedance effects impacting vehicle movements. The ranking of conflicting volumes is addressed, highlighting the significance of each movement’s priority and how it influences available gaps for turning movements. An in-depth analysis of potential capacity under various conditions is provided, along with considerations for shared and exclusive lanes.

Gap Acceptance at Unsignalized Intersections: Critical Factors in Traffic Flow and Control
E N D
Presentation Transcript
Unsignalized Intersections CTC-340
Hmwk • At end of powerpoint
STOP & YIELD controlled • Include TWSC, AWSC and Roundabouts • All models are based on a gap acceptance model
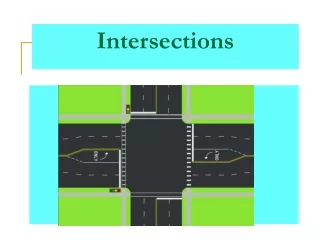
Gap Acceptance • Gap – distance between back of veh and front of next veh – not headway • Each gap can allow at least 1 veh to move • Vehicle using gap is based on a rank order • Figure next slide • Rank 1 – 2,3,5,6,15,16 • Rank 2 – 1,4,13,14,9,12 • Rank 3 - 8,11 • Rank 4 – 7,10 • Why this ranking?
Conflicting Volume • Each movement must content with a different group of conflicting flows • Figure next slide • Look at footnotes • RT from major street do not conflict but some are counted in conflicting volume • 2 stage gap acceptance – median or TWLTL present – cars can cross 1 direction of traffic at a time
Conflicting Volume • Each movement must content with a different group of conflicting flows • Critical volume cmx = cpxPpvippj • cpx= potential movement capacity • pvi= probability that impeding veh movement j will not block flow (impedance factor) • ppj= probability that impeding ped movement j will not block flow (impedance factor)
Critical Gap • Minimum average acceptable gap that allows entry for 1 turning movement • Any gap smaller than critical gap is not used • Follow up time – minimum average acceptable time for a second queued vehicle to use a gap large enough to admit 2+ vehicles
Critical Gap • Critical Gap • tcx = tcb + tcHVPHV + tcGG – tcT – t3LT • Follow up time • tfx = tfb +tfHVPHV • tcb = base critical gap, T23.2 • tcHV= critical gap adjustment for HV • PHV= percent HV • tcG= critical gap adjustment for grade • tcT = critical gap adjustment for 2 stage gap acceptance • t3LT = critical gap adjustment for intersection geo • tfb = base follow up time, T 23.2
Potential Capacity • Assumes that all available gaps are used by subject movement • No higher priority movements will be at intersection • Assumes movement operates in exclusive lane • cpx = vcx[(e^-(vcx*tcx/3600))/(1-e^-(vcx*tfx/3600))] • vcx = conflicting flow for movement x
Impedance Effects • Effects due to higher ranked movements using a gap • Reduces the available gaps for the subject movement • Figure next page • First find movement capacity • cmx = cpxPpvippj • cmx = movement capacity • cpx = potential capacity • pvi = probability that movement i is not blocking subject flow • ppj = probability that pedestrian movement j is not blocking subject flow
Impedance Effects • Effects due to higher ranked movements using a gap • Reduces the available gaps for the subject movement
Impedance Effects • pvi = 1 – vi/cmi • vi = demand flow for impeding movement i • cmi = movement capacity for impeding movement i • The lower the v/c ratio for the impeding movement – the more likely that the subject flow will not be impeded • Rank 4 movements are impeded by many movements- may end up double counting impedance factor • p” = Pv1*Pv4*PvTH
Impedance Effects • p’ = 0.65p” – (p”/(p”+3) + 0.6SQRT(p”) • p’” = unadjusted impedance factor • p’ = adjusted impedance factor • Need to modify Major St LT when in shared lane • P*v1/4 = 1 – ((1-Pv1/4)/(1-(vmTH/smTH + vmRT/smRT))) • Ped impedance factor • ppj = 1 – (vj(w/Sp)/3600) • vj = ped flow rate • w = lane width • Sp= ped speed fps
Shared Lane Cap • Movement capacities assume exclusive lanes for each movement • When movements operate out of a shared lane • cSH = Svy/S(vy/cmy) • Capacity = total flow rate/ cSH
Upstream Signals • Gap acceptance assume random arrivals for all vehicles • If signalized intersections within ¼ mile – not true • Each platoon gives a different conflicting flow to the downstream intersection • Very complex
2 stage gap acceptance • Occurs at divided highways or TWLTL • Increases capacity for minor street movements due to ability to cross 1 traffic stream at a time. • Limiting factors are the # of vehicles that can be in the median at the same time
Flared Lanes • Lane operates between exclusive lane and shared lane • Need to know average queue length of RT traffic • If max queue length <= # of flared spaces – operates like a separate lane • If max queue > # of flared spaces then capacity is a constrained
Delay • What is it • Control delay – includes time stopped in queue + time to decel + accel • Geometric delay – delay due to decel/accel to get thru intersection • HCM uses control delay as its MOE • dx = 3600/cmx +900T((vx/cmx-1)+SQRT((vx/cmx-1)^2 + (3600/cmx)(vx/cmx)/450T)) + 5
Delay • Delay is given for approach lane groups • Each exclusive lane or each shared lane • Major St LT • Major street thru assumed to have no delay • Depends on whether LT has an exclusive lane • Usually very small if it does occur
Queue Length • Q95x = 3600/cmx +900T((vx/cmx-1)+ SQRT((vx/cmx-1)^2 + (3600/cmx)(vx/cmx)/150T)) *(cmx/3600) • 95th percentile queue • Gives a sense of congestion at intersection • Higher queue means lower LOS
AWSC • Based on FIFO queue • Looks at probability of intersection in a certain condition • Determines the probability of each condition occurring given volumes and assesses the impact • Each approach affects the others • Iterative process
Roundabouts • Roundabouts must be Yield controlled and have a splitter island
Example 1 Spdlmt = 35 mph for A 45mph for B A 35’ 40’ B
Prob 23-2 Determine the potential capacities for movements 1,7,8,9 • Prob 23-3 Determine the movement capacities for movements 1,7,8,9 • Prob 23-4 Determine the shared lane capacities for movements 7,8