Download

1 / 69
830 likes | 1.98k Views
Computer-Assisted Surgery Medical Robotics Medical Image Processing. LECTURE 1 What‘ s in a surgery Technical tools in CS CAS systems. PAST: Cut, then see. PRESENT: See, then cut. Preoperative Imaging. Intraoperative Execution . FUTURE: Combine, see, minimally cut. Image guidance.

E N D
Computer-Assisted Surgery Medical Robotics Medical Image Processing LECTURE 1 What‘s in a surgery Technical tools in CS CAS systems
PRESENT: See, then cut Preoperative Imaging Intraoperative Execution
FUTURE: Combine, see, minimally cut Image guidance Augmented reality
How do surgeries proceed? • Diagnosis • based on physical exams, images, lab tests • Preoperative planning • determine the surgical approach • elaborate intraoperative plan (path, tools, implants) • Surgery • prepare patient and assess condition • acquire intraoperative images, adapt and execute plan • Postoperative follow-up • exams, lab tests, images to be corroborated
Treatment procedures • Invasive • neurosurgery: tumor removal • hear surgery: clogged arteries, transplants • orthopaedic surgery: spine, hip replacement, knee, fractures • gall bladder removal, prostate, various cancers • Non-invasive • radiation therapy • kidney stone pulverization
Medical imaging modalities • Preoperative • Film X-rays, Digital X-rays, Ultrasound, Angiography, Doppler, …. • Computed Tomography (CT), Magnetic Resonance (MR), Nuclear Medicine (PET, SPECT, …) • Intraoperative • X-ray fluoroscopy, ultrasound • video images (laparoscopy, arthorscopy) • Open MR
Medical imaging modalities: X-rays X-ray Fluoroscopy Film or Digital X-ray
Medical imaging modalities: CT Series of parallel slices 2mm apart Single slice
Medical imaging modalities: MRI Good imaging of soft tissue
Medical imaging modalities: Nuclear medicine (PET, SPECT, NMR) Functional imaging: colors indicate electrical activity
Medical imaging modalities: video TV quality image from small camera (laparoscope or endoscope)
Surgical approaches • Open surgery • area of interest directly exposed by cutting • direct sight and touch of anatomy by surgeon • direct access but causes additional damage • Closed surgerynot always feasible • indirect access to anatomical area of interest • no direct visual sight or tactile feel • catheterization, biopsies • intraoperative imaging is often required • require more skills: lengthier, more difficult • Diagnostic surgery
Minimally invasive surgery • Provides treatment through small incisions • Uses imaging equipment for seeing and instruments for touching • Advantages: less damage, faster recovery • Disadvantages: hand/eye coordination, time • Examples: • brain tumor removal, laparoscopic surgery
Total hip replacement procedure Procedure Tools Fluoroscopic images
What is required to perform surgery? • Knowledge intensive task • anatomy, procedures, cases • experience, skills, customization and generalization • Manual and cognitive skills • dexterity, precision, strength, tool manipulation • spatial orientation and navigation • Determination • information integration • judgement, decision, execution
Medical and surgical trends • Imaging improved dramatically diagnosis • started with X-rays last century • 30% of all cases use images • Move towards minimally invasive procedures • introduced in the mid ‘70s, slow acceptance (laparoscopy) • the method of choice now • More precise and delicate procedures • Development of sophisticated surgical hardware • High degree of craftsmanship and skills
Socio-economical medical trends • Increase of aging population and associated problems: tumors, osteoporosis, Alzheimers • Larger population volumes • Universal, first rate, highly specialized care • Health care costs reduction (managed care) • Higher patient requirements • Legal and regulatory aspects
Surgical Needs Augment the surgeon’s capabilities with better quantitative planning, execution, and integration • Support for image-guided surgery • Passive and active devices for accurate spatial positioning, tracking, and execution • Modeling, planning, viewing, diagnosis systems • Systems integration: from diagnosis to post-op • Improve current practice and enable new procedures • Simulation and training systems Parts of the technology already available elsewhere!
Current clinical status • Imaging • vast databases of medical images • digitized atlases • mostly uncorrelated unimodal qualitative interpretation • Devices • mostly passive and non-invasive (supports) • laparoscopic camera, • some real-time tracking • Planning, modeling, visualization • 3D reconstruction, some registration
Part 2: Computers and Robots Technology and algorithms available today
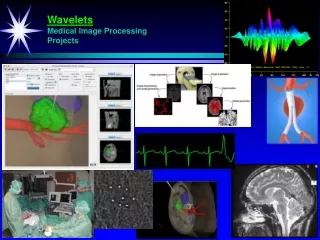
How can computers help?(or are already helping…) • Image processing • single image: enhancement, noise reduction, segmentation, quantitative measurements • image stacks: 3D reconstruction, segmentation • image sets: registration, comparison, data fusion • Planning and simulation • integrate medical images and CAD models • planning and simulation programs • Computer vision and graphics • camera modeling, image registration, rendering
Image processing Measurements 2D segmentation 3D segmentation Surface modeling Image fusion Atlas
Planning and simulation Nail selection Walking simulation
How can robots and sensors help?(or are already helping…) • Robotic devices • passive, semi-active, active devices • instrument and anatomy positioning and holding • cutting and machining • Real-time tracking • optical, video, electromagnetic devices • navigation tools
Robotic devices Passive Semi-active Active
Real-time tracking devices camera instrument Passive markers Instrument has infrared LEDs attached to it Active markers
Computer-Assisted Surgery (CAS) A computer-integrated system to enhance the dexterity, visual feedback, and information integration of the surgeon • Key points: • The goal is NOT to replace the surgeon • A new paradigm for surgical tools • Address a real clinical need • Prove efficacy and cost-effectiveness
Elements of CAS systems • Preoperative planning • image acquisition, modeling, analysis, simulation • plan elaboration, tool and prosthesis selection • Output: preop images, 3D models, prosthesis type and position, navigation and cutting plan • Intraoperative execution • passive, semi-active, active robot • real time tracking • intraoperative imaging (fluoroscopy, ultrasound) All integrated by computer!
State of the Art (1) • Main clinical procedures • neurosurgery: biopsies, tumor removal • orthopaedics: hip and knee replacement, spine, pelvis and femur fractures • maxillofacial and cranofacial • laparoscopy: laparoscope holders • new fields: dentistry, ophtalmology, prostate • Mostly rigid structures: bones!!
State of the Art (2) • Commercial navigation systems • main uses: neurosurgery and spine surgery • Commercial robotic systems • ROBODOC for total hip replacement • laparoscope arm holders • Research • very active, very interdisciplinary • a few dozen systems tested in-vitro
State of the Art (3) • Major players • INRIA Sophia Antipolis, Grenoble, Johns Hopkins, Brigham Women’s H./MIT, Shadyside H./CMU, Imperial College, many places in Germany and Japan • Interdisciplinary conferences and journals • started in 1994: MRCAS’94; Orthopaedic CAS meetings, visualization, etc, • Journals: Computer-Aided Surgery, Medical Image Analysis
Examples of CAS systems in use • Image-guided navigation systems • ROBODOC: Total hip replacement surgery • LARS: Laparoscopic assistant • Radiosurgery Brief overview follows; will be covered in detail later
Image-guide navigation • Purpose • accurate placement of instruments with respect to imaged anatomy for several procedures • Problem addressed • provide 3D vision of unseen structures replace static 2D fluoroscopy or larger openings • improve precision of biopsies, screw placements • Scope • non-invasive • creates surface model from preop images • registration of images to anatomy by direct contact
Status • In clinical use • Over 7,000 neurosurgeries performed with commercial systems • Gaining popularity in pedicle screw insertion • Decreased the misplacement rate from 10-40% to 5-18% (clinical study of 700 cases) • More clinical applications under development
ROBODOC: Total hip replacement • Purpose • precise machining of cementless hip implant canal • Problem addressed • complications in canal preparation and implant fixation • improve positioning accuracy and surface finish • Scope • invasive, numerically controled machining • plan from preop CT, registered via pins • adapted commercial robot • custom bone fixator and bone motion detection
Total hip replacement procedure Procedure Tools Fluoroscopic images
ROBODOC: Total Hip Replacement F S e e m c u t r i o n Manual broaching Robotic broaching