Exploration of Architecture Singularity and Self-Motion in Parallel Manipulators
This study delves into architecture singularities and self-motion capabilities of parallel manipulators, focusing on rational parametrization and algebraic surfaces of degree 12. It explores the concept of architecture singularity, wherein parallel manipulators exhibit singular behavior in every position and orientation, ensuring they have self-motion even with locked actuators. The implications of such self-motions, particularly in 3-3 parallel platforms, are linked to historical and theoretical contexts in geometry and rigid body motion, paving the way for further inquiries into the algebraic characterizations of kinematic constraints.

Exploration of Architecture Singularity and Self-Motion in Parallel Manipulators
E N D
Presentation Transcript
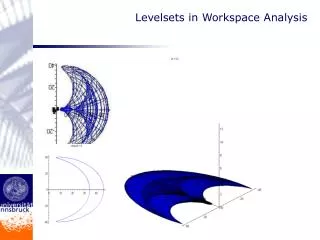
Levelsets in Workspace Analysis F(X,Y,Z) = S1(Z) . S2(X,Y,Z) = 0 S2: algebraic surface of degree 12
rational parametrization M. Noether
Architecture SingularitySelfmotion Definition: a parallel manipulator is called architecture singular if it is singular in every position and orientation. Det(J)≡ 0 H. and Karger, A., 2001 Karger, A., 1998
Architecture SingularitySelfmotion Parallel Manipulator performs a self motion when it moves with locked actuators System of equations describing the kinematical constraints has to be redundantaffine variety is no longer zero dimensional Planar case: only one possibility parallel bar mechanism
Architecture SingularitySelfmotion H. , Zsombor-Murray, P., 1994, ''A Special Type of Singular Stewart Gough Platform'' Blaschke‘s movable octahedron Topic is closely related to an old theorem of Cauchy (1813): „Every convex polyhedron is rigid“
Architecture SingularitySelfmotion • Self motions of 3-3-platforms are well known since more than 100 years (Bricard 1897) • Self motions of platform mani-pulators are closely related to motions with spherical paths • Motions with spherical paths were the topic of the 1904 Prix Vaillant of the French Academy of Science • E. Borel and R. Bricard won the prestigeous competition and gave many examples • All architecture singular manipulators have self motion • Still many open questions
Architecture SingularitySelfmotion • Bricard‘s octahedron • Griffis-Duffy platform Griffis, M., Duffy, J., 1993, "Method and Apparatus for Controlling Geometrically Simple Parallel Mechanisms with Distinctive Connections", US Patent # 5,179, 525, 1993.
6-AS-mechanisms Inverse kinematics of concatenations of AS-joints 4 AS-mechanism: dimension of the problem 48 6 AS-mechanism: dimension of the problem ?????
Analysis and Synthesis of Serial Chains Inverse Kinematics of general 6R-chains Synthesis of Bennett mechanism Lee and Liang (1988) Raghavan and Roth(1990) Wampler ,…………. Veldkamp, Roth, Tsai, McCarthy, Perez,…..
Discussion of the Inverse Kinematics of General 6R-Manipulators
Constraint manifolds of 3R-chains H. et. al. (2007), Pfurner (2006)
Synthesis of Bennett mechanims Previous work: Veldkamp (1967) instantaneous case: 10 quadratic equations elimination yields univariate cubic polynomial with one real solution Suh and Radcliffe (1978) same result for finite case Tsai and Roth (1973) cubic polynomial McCarthy and Perez (2000) finite displacement screws
Synthesis of Bennett mechanims Linear 3-space • intersection of two three-spaces L13, L23 in a seven dimensional space P7 can be: • dim(L13Å L23)= -1, ) intersection is empty, • dim(L13Å L23)= 0, ) intersection is one point, • dim(L13Å L23)= 1, ) intersection is a line, • dim(L13Å L23)= 2, ) intersection is a two-plane • dim(L13Å L23)= 3 ) L13 and L23 coincide.
Synthesis of Bennett mechanims 3 Conclusions: • The kinematic image of the Bennett motion is the intersection of a two-plane with the Study-quadric S62. • Bennett motions are represented by planar sections of the Study-quadric and vice versa. • Bennett linkages are the only movable 4R-chains.
Synthesis Algorithm • Given three poses of a frame 1, 2, 3 compute the Study parameters ! A,B,C (three points on S62) • Compute the conic f(s) passing through A,B,C • Apply inverse kinematic mapping (-1): Substitute the parametric representation of f into transformation matrix ! parametric representation M(s) of Bennett motion. • Compute the axes of the motion • Following Bottema-Roth (1990) • Computing planar paths • Using the fact that the points of four planes have rational represenations with elevated degree
Synthesis Algorithm (example) Computing the torsionfree paths to obtain the axes leads to four cubic surfaces having six lines in common.
Conclusion • Mechanisms can be represented with sets of algebraic equations. • Constraints map to algebraic varieties in the image space. • Geometric preprocessing and symbolic computation allow to solve kinematic problems • The algebraic constraint equations are highly sparse.