Download
1 / 81
840 likes | 1.18k Views
Chapter - 6 Inelastic Seismic Response of Structures. 1/1. Introduction. Under relatively strong earthquakes, structures undergo inelastic deformation due to current seismic design philosophy. Therefore, structures should have sufficient

E N D
Chapter - 6 Inelastic Seismic Response of Structures
1/1 Introduction • Under relatively strong earthquakes, structures • undergo inelastic deformation due to current • seismic design philosophy. • Therefore, structures should have sufficient • ductility to deform beyond the yield limit. • For understanding the ductility demand imposed • by the earthquake, a study of an SDOF • system in inelastic range is of great help. • The inelastic excursion takes place when the • restoring force in the spring exceeds or equal to • the yield limit of the spring.
Contd.. 1/2 • For this, nonlinear time history analysis of SDOF • system under earthquake is required; similarly, • nonlinear analysis of MDOF system is useful for • understanding non-linear behaviour of MDOF • system under earthquakes. • Nonlinear analysis is required for other reasons • as well such as determination of collapse state, • seismic risk analysis and so on. • Finally, for complete understanding of the • inelastic behavior of structures, concepts of • ductility and inelastic response spectrum are • required. • The above topics are discussed here.
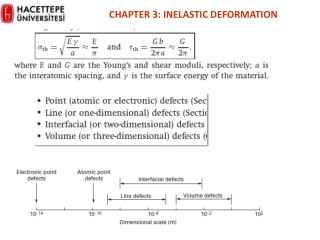
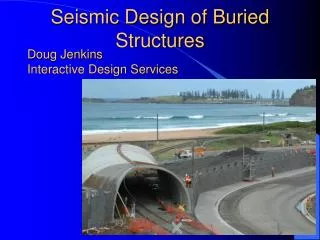
Non linear dynamic analysis 1/3 • If structure have nonlinear terms either in inertia • or in damping or in stiffness or in any form of • combination of them, then the equation of motion • becomes nonlinear. • More common nonlinearities are stiffness and • damping nonlinearities. • In stiffness non linearity, two types of non linearity • are encountered : • Geometric • Material (hysteretic type) • Figure 6.1 shows non hysteric type non linearity; • loading & unloading path are the same.
f Unloading Loading D x x Loading Unloading Contd.. 1/4 Fig.6.1
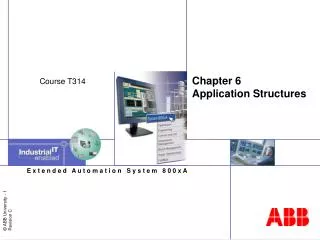
f f f y f y x x x x y y f f f f y y x x x x y y Contd.. 1/5 • Figure 6.2 shows hysteric type nonlinearity; • experimental curves are often idealised as • (i) elasto plastic; (ii) bilinear hysteretic ; • (iii) general strain hardening Variation of force with displacement under cyclic loading Idealized model of forcedisplacement curve Idealized model of forcedisplacement curve Fig.6.2
1/6 Contd.. • Equation of motion for non linear analysis takes • the form • and matrices are constructed for the • current time interval. • Equation of motion for SDOF follows as • Solution of Eqn. 6.2 is performed in incremental • form; the procedure is then extended for MDOF • system with additional complexity. • and should have instantaneous values.
Contd.. 1/7 • and are taken as that at the beginning of • the time step; they should be taken as average • values. • Since are not known, It requires an • iteration. • For sufficiently small , iteration may be • avoided. • NewMark’s in incremental form is • used for the solution
Contd.. 1/8
Contd.. 1/9 • For more accurate value of acceleration, it is • calculated from Eq. 6.2 at k+1th step. • The solution is valid for non hysteretic non • linearity. • For hysteretic type, solution procedure is • modified & is first explained for elasto - plastic • system. • Solution becomes more involved because • loading and unloading paths are different. • As a result, responses are tracked at every time • step of the solution in order to determine loading • and unloading of the system and accordingly, • modify the value of kt.
1/10 Elasto-plastic non linearity • For material elasto plastic behaviour, is taken • to be constant. • is taken as k or zero depending upon • whether the state is in elastic & plastic state • (loading & unloading). • State transition is taken care of by iteration • procedure to minimize the unbalanced force; • iteration involves the following steps. • Elastic to plastic state
Contd.. 1/11 • Use Eq. 6.7, find • Plastic to plastic state • Eq. 6.7 with Kt=0 is used ; transition takes place if • at the end of the step; computation is then restarted. • Plastic to elastic state • Transition is defined by • is factored (factor e) such that • is obtained for with
x f x m c .. x g f x 0.15mg x 0.0147m Contd.. 2/1 • Example 6.1 Refer fig. 6.3 ; ; find responses at t=1.52 s & 1.64s given responses at • t= 1.5s & 1.62s ; m=1kg • Solution: SDOF system with non-linear spring Force-displacement behaviour of the spring Fig . 6.3
Contd.. 2/3
0.5m V p 1 0.5k 0.5k m x x y 1 k k V m p 2 k k x x y 2 m V p 3 1.5k 1.5k x x y 3 2/4 Solution for MDOF System • Sections undergoing yielding are predefined and • their force- deformation behaviour are specified • as shown in Fig 6.4. Fig.6.4 • For the solution of Eqn. 6.1, state of the yield • section is examined at each time step.
Contd.. 2/5 • Depending upon the states of yield • sections, stiffness of the members are changed & • the stiffness matrix for the incremental equation is • formed. • If required, iteration is carried out as explained for • SDOF. • Solution for MDOF is an extension of that of SDOF.
Contd.. 2/6 • Example 6.2: Refer to Fig 6.5; K/m = 100; m = 1 kg; • find responses at 3.54s. given those at 3.52s. • Solution:
m x 3 k/2 3m k/2 m x 2 3m k/2 k/2 m x 1 k/2 k/2 3m f y = f 0.15m g y = x 0.01475m y x x y Contd.. 2/7 3 storey frame Force displacementcurve of the column Fig.6.5
Contd.. 2/8
Contd.. 2/9
3/1 Bidirectional Interaction • Bidirectional interaction assumes importance • under: • Analysis for two component earthquake • Torsionally Coupled System • For such cases, elements undergo yielding • depending upon the yield criterion used. • When bidirectional interaction of forces on • yielding is considered, yielding of a cross • section depends on two forces. • None of them individually reaches yield value; • but the section may yield.
Contd.. 3/2 • If the interaction is ignored, yielding in two • directions takes place independently. • In incremental analysis, the interaction effect is • included in the following way. • Refer Fig 6.6; columns translate in X and Y • directions with stiffness and .
D Colm. 2 Colm. 4 CR C.M. X D e y e x Y Colm. 1 Colm. 3 Contd.. 3/3 Fig.6.6
Contd.. 3/4 • Transient stiffness remaining constant over • is given by • The elements of the modification matrix are
Contd.. 3/5 • When any of the column is in the full plastic state • satisfying yield criterion, . • During incremental solution changes as the • elements pass from E-P, P-P, P-E; the change • follows E-P properties of the element & yield • criterion. • Yield criterion could be of different form; most • popular yield curve is
Contd.. 3/6 • For , curve is circular ; , • curve is ellipse; shows plastic state, • shows elastic state, is inadmissible. • If , internal forces of the elements are • pulled back to satisfy yield criterion; equilibrium • is disturbed, corrected by iteration. • The solution procedure is similar to that for • SDOF. • At the beginning of time , check the states of the • elements & accordingly the transient stiffness • matrix is formed.
3/7 Contd.. • If any element violates the yield condition at the • end of time or passes from E-P, then an • iteration scheme is used. • If it is P-P & for any element, then an • average stiffness predictor- corrector scheme • is employed. • The scheme consists of : • is obtained with for the time internal Δt & • incremental restoring force vector is obtained.
3/8 Contd.. • After convergence , forces are calculated & • yield criterion is checked ; element forces are • pulled back if criterion is violated. • With new force vector is calculated & iteration • is continued. • For E-P, extension of SDOF to MDOF is done. • For calculating , the procedure as given in • SDOF is adopted.
3/9 Contd.. • If one or more elements are unloaded from plastic to elastic state, then plastic work increments for the elements are negative • When unloaded, stiffness within , is taken as • elastic. • Example 6.3: Consider the 3D frame in Fig 6.8; • assume:
k 1.5k D A y 2k 1.5k 3.5m 3.5m x B C 3.5m Force (N) For column A 152.05 N Displacement (m) 0.00467m Contd.. 3/10 find Initial stiffness & stiffness at t = 1.38s, given that t = 1.36s 3 D frame Force-displacementcurve of column A
3/11 Solution: Forces in the columns are pulled back (Eq. 6.23) & displacements at the centre
Contd.. 3/12
Contd.. 3/13 • With the e values calculated as above, the forces in the columns are pulled back
Contd.. 3/14
Contd.. 3/15
Contd.. 3/16
Contd.. 3/17 Because yield condition is practically satisfied, no further iteration is required.
4/1 Multi Storey Building frames • For 2D frames, inelastic analysis can be done • without much complexity. • Potential sections of yielding are identified & • elasto–plastic properties of the sections are • given. • When IMI = Mp for any cross section, a hinge is • considered for subsequent & stiffness matrix • of the structure is generated. • If IMI > Mp for any cross section at the end of • IMI is set to Mp, the response is evaluated with • average of stiffness at t and (IMI = Mp ).
Contd.. 4/2 • At the end of each , velocity is calculated at • each potential hinge; if unloading takes place at • the end of , then for next , the section • behaves elastically. ( ). Example 6.4 • Find the time history of moment at A & the force- • displacement plot for the frame shown in Fig 6.9 • under El centro earthquake; ; compare the results for elasto plastic & bilinear back bone curves. • Figs. 6.10 & 6.11 are for the result of elasto • -plastic case Figs 6.12 & 6.13 are for the result • of bilinear case • Moment in Fig 6.12 does not remain constant • over time unlike elasto-plastic case.
m x 3 k k 3m m x 2 3m k k m x 1 k = 23533 kN/m 1.5k 1.5k 3m K m = 235.33 103 kg d A 346.23kN Force (kN) = KK 0.1 di K Displacement (m) 0.01471m i Contd.. 4/3 Frame Force-displacementcurve of column Fig.6.9
Contd.. 4/4 Fig.6.10 Fig.6.11
Contd.. 4/5 Fig.6.12 Fig.6.13
4/6 Contd.. • For nonlinear moment rotation relationship, • tangent stiffness matrix for each obtained • by considering slope of the curve at the • beginning of • If unloading takes place, initial stiffness is • considered. • Slopes of backbone curve may be interpolated ; • interpolation is used for finding initial stiffness. • If columns are weaker than the beams, then top • & bottom sections of the column become • potential sections for plastic hinge. • During integration of equation of motion is • given by
Contd.. 4/7 • Non zero elements of Kp are computed using • Eqns. 6.15 & 6.16 and are arranged so that they • correspond to the degrees of freedom affected by • plastification. • The solution procedure remains the same as • described before. • If 3D frame is weak beam-strong column system, • then problem becomes simple as the beams • undergo only one way bending. • The analysis procedure remains the same as • that of 2D frame.
4/8 Contd.. • For 2D & 3D frames having weak beam strong • column systems, rotational d.o.f are condensed • out; this involves some extra computational • effort. • The procedure is illustrated with a frame as • shown in the figure (with 2 storey). • Incremental rotations at the member ends • are calculated from incremental • displacements. • Rotational stiffness of member is modified • if plastification/ unloading takes place. • The full stiffness matrix is assembled & • rotational d.o.f. are condensed out.
M1, M2 Mp1 = Mp2 = Mp3 q q p Contd.. 4/9 • Elasto-plastic nature of the yield section is • shown in Fig 6.16. • Considering anti-symmetry : Moment-rotation relationship of elasto-plastic beam fig. 6.16
Contd.. 4/11 • Equation of motion for the frame is given by: • The solution requires to be computed at time • t; this requires to be calculated. • Following steps are used for the calculation
4/12 Contd.. • & are obtained using Eqn. 6.29b • in which values are calculated as: • & are then obtained; and hence • & & are calculated from • and , is obtained using ( Eq. 6.30). • If Elasto-plastic state is assumed, then • for at the beginning of the time • interval; for unloading are obtained • by (Eq.6.28a.)