Download
1 / 32
320 likes | 480 Views
CLOUD RETRIEVAL. An overview of CM SAF cloud retrieval methods. Karl-Göran Karlsson SMHI, Sweden. Outline : How do we observe clouds from space? Which cloud properties can be observed from space? Which satellites and sensors are most useful ?

E N D
CLOUD RETRIEVAL An overviewof CM SAF cloudretrievalmethods Karl-Göran KarlssonSMHI, Sweden • Outline: • How do weobserveclouds from space? • Whichcloudpropertiescan be observed from space? • Whichsatellites and sensors aremostuseful? • Whichretrievalmethodsareused in the CM SAF?
CLOUD RETRIEVAL Couldyoupleaseclick on the map and indicatewhereyouare? (Maybewecandeducewhichparticipant gets mostsunshine!)
What is a cloud? What makes usobservethem? Photo by Karin Dalziel
What is a cloud? A collectionofliquid or frozenparticlesfloating in the atmosphere and sustained by vertical motion (updrafts) What makes usobservethem? Weidentifyclouds by theirabilitytoreflectsunlight and by the temperatureoftheircloud tops, i.e., theirbrightness in visible and thermalimagery! Photo by Karin Dalziel
Observation ofclouds Whatotherconditionsneedto be fulfilled for successfulclouddetection from space (please tick!)? • Clouds must be precipitating • Rocketengines must be active • The atmosphereitself must be transparent • No airplanesshouldintersect at observation time • International Space Station must be outofsight • Clouds must appearbrighterthan the Earth surface • Migratingbirds must be on ground • No rainbowsshouldinterfere • Cloud tops must be colderthan the Earth surface • No Quidditch games allowed at observation times
Observation ofclouds Whatotherconditionsneedto be fulfilled for successfulclouddetection from space (please tick!)? Correctchoices: • Clouds must be precipitating • Rocketengines must be active • The atmosphereitself must be transparent • No airplanesshouldintersect at observation time • International Space Station must be outofsight • Clouds must appearbrighterthan the Earth surface • Migratingbirds must be on ground • No rainbowsshouldinterfere • Cloud tops must be colderthan the Earth surface • No Quidditch games allowed at observation times x x x
Observation ofclouds Weneed a transparent atmosphereto be abletoobserveclouds in imagery!
Observation ofclouds Weneed a transparent atmosphereto be abletoobserveclouds in imagery! Common spectral bands: 0.6 m, 0.8 m, 1.6 m, 3.7 m, 8.7 m, 11 m and 12 m.
Observation ofclouds Weneedcontrastbetweenclouds and otherobjectsto be abletodetectclouds in imagery!
Observation ofclouds Aretherecloudsthatcouldremainundetected?
Observation ofclouds Aretherecloudsthatcouldremainundetected? • Yes, thereareactuallyseveral occasions whenthismightoccur: • Bright clouds over brightsurfaces, e.g., over snow-covered or desertsurfaces • Cold clouds over coldsurfaces, e.g. over almost all polar surfaces in the polar winter + thin cirrus clouds over snow-coveredsurfaces • Extreme cases: Lowcloudsarewarmerthan the surface (e.g., stratus clouds over the Arctic ocean in polar summer) • Warmclouds in twilight situations
Optimal detectionofclouds Usedifferences in the appearanceofclouds in different spectralchannels! Examplebelow over Turkey: Clouds over snow-cover (magenta) caneasily be detectedifutilisingthattheyreflect in the 1.6 micronchannelwhilesnow is not!!! Metop-A RGB Composite 17 January 2012 VIS0.6, NIR1.6, IR11.0 07:49:00 UTC
Optimal detectionofclouds Usedifferences in the appearanceofclouds in different spectralchannels! Examplebelow over Turkey: Clouds over snow-cover (magenta) caneasily be detectedifutilisingthattheyreflect in the 1.6 micronchannelwhilesnow is not!!! USE MULTISPECTRAL METHODS!!! Metop-A RGB Composite 17 January 2012 VIS0.6, NIR1.6, IR11.0 07:49:00 UTC
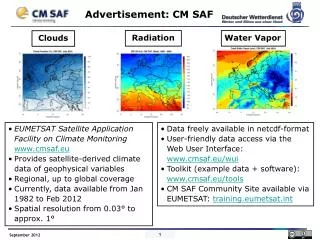
Suitable sensors for cloud screening The mainobjective for the EUMETSAT CM SAF is touse sensors from operationalweathersatellites for climatemonitoring. Most suitable image sensors is then AVHRR on polar orbiting NOAA/Metopsatellites and SEVIRI on the geostationary METEOSAT satellite The Metop-A satellitecarrying AVHRR imagerwith 6 spectral bands The METEOSAT satellitecarrying SEVIRI imagerwith 12 spectral bands
Basic cloud screening in CM SAF Twomultispectralcloudprocessingmethodsareused in the CM SAF: The PPS (Polar Platform System) and MSG cloudprocessing packages provided by the EUMETSAT Nowcasting SAF project Exampleof NWC SAF MSG cloudtypeproductfrom 14 October2003 (animation available for download!)
Basic cloud screening in CM SAF • Common basicmethodology for the PPS (Polar Platform System) and MSG cloudprocessing packages: • Multispectralthresholding, i.e., a pixel is labelledcloudyifradiancesexceedthresholds in a numberspectralchannels or channel combinations (e.g. radiancedifferences) • Thresholdsdepend on illumination conditions, viewingangles and the atmosphericbackgroundstate (taken from ERA-Interim) • For several tests, thresholdsarebased on simulations ofradiances from cloud-freesurfaces
Basic cloud screening in CM SAF • PPS (Polar Platform System) and MSG cloudprocessing packages – • Major features used in cloud screening: • Clouds arebrighterthan Earth surfaces in visiblechannels • Clouds arecolderthan Earth surfaces in infrared channels • Watercloudsreflectradiation at short-wave infrared channels (1.6 micron and 3.7 micron) while Earth surfaces do not reflect • Thinicecloudsare less transparent at longer infrared wavelengs, i.e., cirrus can be detectedusingdifferencebetween 11 and 12 micronchannels • Waterclouds at nightare not black-bodies in 3.7 micronchannel, i.e., can be detectedusingdifferencebetween 3.7 and 11 micron • Pixel-sizecloudscan be detectedusing simple texturemeasures
Cloud top determination Cloud heightretrievals from passive imagers in space aredifficult. Why?
Cloud top determination Cloud heightretrievals from passive imagers in space aredifficult. Why? One major reason: Wemeasure the verticallyintegrated (i.e., along the lineofsight) radiationthatenters the sensor detector in space If weobserve a thin transparent cloud, radiationcontributions come in various proportions from the clouditself and all underlyingclouds/surfaces!
Cloud top determination Cloud heightretrievals from passive imagers in space aredifficult. Why? One major reason: Wemeasure the verticallyintegrated (i.e., along the lineofsight) radiationthatenters the sensor detector in space If weobserve a thin transparent cloud, radiationcontributions come in various proportions from the clouditself and all underlyingclouds/surfaces! • Another fundamental problem: • Evenif the cloud is opaque (thus, weareabletoestimate the truecloudtoptemperature), thistemperaturecanoften be found at severalaltitudes in the atmosphere (dueto inversions)
Cloud top determination Methodsused for the CM SAF datasets (still based on NWC SAF packages): • For opaqueclouds(negligible brightnesstemperaturedifferencebetween 11 and 12 micronchannels): • Matchingofmeasuredbrightnesstemperatures (horizontaldashedline) withsimulatedones (dashedcurve, usingradiative transfer methods like RTTOV) and referenceprofiles from ERA-Interim(solid curve) Cloud top for low-levelcloud Cloud top for high-levelcloud
Cloud top determination Methodsused for the CM SAF datasets (still based on NWC SAF packages): For semi-transparent clouds: Alternative 1 (MSG) Form quotasofradiances in twochannelswith different transmissivities – the quota is a functionofpressure in an atmospherewithouttemperature inversions(calledRadianceRatioing or CO2 slicing– onlyapplicapleto MSG SEVIRI!) Soundingchannel(onlyhighcloudsvisible) Windowchannel(’All’ cloudsvisible)
Cloud top determination Methodsused for the CM SAF datasets (still based on NWC SAF packages): For semi-transparent clouds: Alternative 2 (PPS) Createplotofbrightnesstemperaturedifferencesbetween 11 and 12 micronchannels over a sub-segment of the image – then, fit an archcurve (polynomial) tofindout the corresponding (opaque) cloudtoptemperature Cloudy pixels for onecloudlayerwithvaryingcloudthickness Retrievedcloudtoptemperature x
Cloud Physical Products (CPP) Whatcanwesayaboutcloudproperties on the cloudparticlescale? • CM SAF datasets include a set ofcloudproductsthatwe call Cloud Physical Products (CPP). Theseare • Cloud OpticalThickness • Cloud EffectiveRadius • Cloud Phase • LiquidWaterPath • IceWaterPath = Integrateddimensionlessextinctioncoefficient = ’Average’ particlesize = Liquid or frozen = Integratedliquidsubstance in kgm-2 = Integratedicesubstance in kgm-2
Cloud Physical Products (CPP) Basic principles for CPP retrievals: • Reflectance of clouds at a non-absorbing wavelength in the visible region (VIS: 0.6 or 0.8 micron) is strongly related to the optical thickness • Reflectance of clouds at an absorbing wavelength in the near-infrared region (NIR: 1.6 or 3.7 micron) is primarily related to particle effective radius • Ice clouds absorb more (reflects less) radiation at NIR wavelengths
Cloud Physical Products (CPP) Practical implementation: Search in lookuptables (LUT) withsimulatedradiances for waterclouds (left) and iceclouds (right) Curves show opticalthicknessvaluesvertically and effectiveradiihorizontally Radiance transfer simulations madewith DAK (Doubling-Adding KNMI model) Iceclouds Waterclouds
Cloud Physical Products (CPP) Strategyincludingmethodwhen simulations overlap: • Try both phases • Use also cloud-top temperature (CTT) threshold water ice
Cloud Physical Products (CPP) Computationofliquid (LWP) or icewater (IWP) paths: Products derived from opticalthickness and effectiveradiusreusing the followingparameterisation whereis density.
Cloud Physical Products (CPP) Flowchart for CPP retrievals:
Cloud Physical Products (CPP) Demonstration ofliquidwaterpathproduct (hurricane Helene Feb 2009): (SEVIRI animation available for download!)
Conclusions • Multispectralanalysisof SEVIRI and AVHRR radiancesallowsefficientclouddetection and cloudtypeidentification- NWC SAF algorithmsused by CM SAF- Some problems at twilight and in coldwinter situations • Cloud top determination is moredifficult and requiressophisticatedmethodsheavilydepending on radiative transfer calculations • Deeperanalysisofcloudproperties on the microscale is possible by useofnear-infrared and and short-wave infrared channels at 1.6 and 3.7 microns- CM SAF relying on methodsdeveloped by KNMI