Interactive Traffic Simulation for Efficient Movement Analysis
160 likes | 260 Views
This research focuses on a hybrid simulation of large-scale traffic, blending agent-based and continuum-based approaches. The method aims for fast, scalable, and visually interactive traffic simulation to optimize analysis of contact, collision, and congestion in dynamic traffic scenarios.

Interactive Traffic Simulation for Efficient Movement Analysis
E N D
Presentation Transcript
Contact, Collision and Congestion Nobuyuki Umetani
Interactive Hybrid Simulation of Large-Scale Traffic Jason Sewall (Intel Corporation), David Wilkie, Ming C. Ling (University of North Carolina)
Motivation • Efficient traffic simulation • Fast • Scalable • Interactively moving visible region
Method • Visible Region -> Agent based approach • Solve for each car speed & position • Invisible Region -> Continuum based approach • Solve for car density average velocity Invisible (Continuum Based ) Visible( Agent Based )
Agent Generation from Continuum data • Stochastic Theory • Model Car distances with Poisson’s distribution • For the accuracy, λ is function of x, not constant
Pattern-Guided Smoke Animation with Lagrangian Coherent Structure Zhi Yuan, Fan Chen, Ye Zhao (Kent State University)
Motivation • Fit hi-res fluid simulation to low-res simulation • hi-res : detail, expensive • Low-res : no detail, cheap, controllable Hi-Res Low-Res
Method • Extract skeleton from low-res fluid simulation • Fluid skeleton : Lagrangian Coherent Structure(LCS) • LCS is computed from FTLE(finite-time Lyapunov exponent) • Assimilate high-res fluid velocity to low-res at LCS
Computation of LCS FTLS 0 thinning 10 thinning 5 thinning
Interference Aware Geometric Modeling David Harmon (New York University), Daniele Panozzo (University of Genova), Olga Sorkine (ETH Zurich), Denis Zorin (New York University)
Motivation • Deform Surface avoiding penetration • Interactive Speed • Various type surface • Close/non-close mesh • Subdivision surface
Method • Space-time frame work • Space-time Interference Volume(STIV)
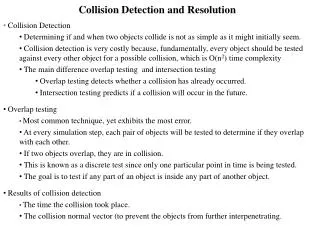
Imperceptible Relaxation of Collision Avoidance Constraints in Virtual Crowds Richard Kulpa, Anne-Helene Olivier Jan Ondrej, JulienPettre (INRIA, Grenoble, France)
A Hybrid Iterative Solver for Robustly Capturing Coulomb Friction in Hair Dynamics Gilles Daviet, Florence Bertails-Descoubes, Laurence Boissieux (INRIA, Grenoble, France)