Code Pseudorange Positioning
X i , Y i , Z i. R3. R4. R 2. R 1. Ux,Uy,Uz. Code Pseudorange Positioning. R j = 의사거리 X i ,Y i ,Z i = 위성의 위치 Ux,Uy,Uz = 사용자 위치 C r = 수신기 시계오차. (X1-Ux) 2 + (Y1-Uy) 2 + (Z1-Uz) 2 = (R1-Cr) 2 (X2-Ux) 2 + (Y2-Uy) 2 + (Z2-Uz) 2 = (R2-Cr) 2

Code Pseudorange Positioning
E N D
Presentation Transcript
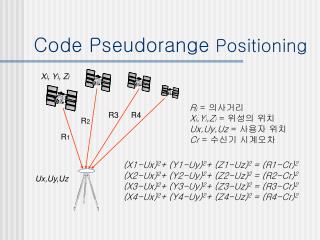
Xi, Yi, Zi R3 R4 R2 R1 Ux,Uy,Uz Code Pseudorange Positioning Rj = 의사거리 Xi,Yi,Zi = 위성의 위치 Ux,Uy,Uz = 사용자 위치 Cr = 수신기 시계오차 (X1-Ux)2+ (Y1-Uy)2+ (Z1-Uz)2 = (R1-Cr)2 (X2-Ux)2+ (Y2-Uy)2+ (Z2-Uz)2 = (R2-Cr)2 (X3-Ux)2+ (Y3-Uy)2+ (Z3-Uz)2 = (R3-Cr)2 (X4-Ux)2+ (Y4-Uy)2+ (Z4-Uz)2 = (R4-Cr)2
왜 4대의 위성이 필요한가? • 1/1,000,000초 오차발생시 빛의 속도가 약 300,000km이므로 300m의 거리 오차 야기함 • 위성은 원자시계 사용하며, 위성시계보정항이 있지만, 수신기는 수정시계 장착하므로 수신기 시계오차 보정이 필요 • 4개의 미지수 존재 • 미지점의 3차원 좌표와 수신기시계보정량
: 반송파 맥놀이 위상 관측값, : 파장 : 실제거리, : 위성 주파수 : 미지정수, : 위성과 수신기 시계오차의 조합항 Carrier Phase Positioning • 실제 관측되는 반송파 위상 • 임의 순간에 대한 반송파 맥놀이 위상의 우수리 부분 • 반송파 위상 방정식
Carrier Phase Positioning -계속- • 반송파 위상 방정식의 양변에 파장 λ를 곱하면 거리 단위의 방정식 형성됨 • 반송파 위상의 우수리 부분 관측값과 미지정수 해결을 통해 위성과 수신기간 정밀거리 계산
GPS 오차 • GPS 시스템 오차 • DGPS, 상대측위로 보정 가능 • 위성시계오차, 위성궤도오차, 전리층 굴절오차, 대류권 굴절오차, SA에 의한 오차 • GPS 수신기 오차 • DGPS, 상대측위로 보정 불가 • 위성의 배치상태에 따른 오차 • DOP(GDOP, PDOP, etc)
GPS 시스템 오차 -계속- • 위성시계오차와 궤도오차 • 위성의 궤도력에 포함된 오차로 인해 야기됨 • 전리층 굴절오차 • 위성신호가 전리층을 통과하면서 굴절되어 야기됨 • 방송궤도력에 포함된 정보를 이용하여 대략적인 보정 가능(약 50%) • L1신호와 L2신호가 전리층에서 굴절되는 비율이 서로 다르기때문에 L1/L2 선형조합을 통해 전리층 굴절 보정가능
GPS 시스템 오차 -계속- • 대류권 굴절오차 • 중성자로 구성된 대기의 영향에 따라 위성신호가 굴절하여 야기됨 • 중성자는 15GHz 이하의 주파수를 갖는 라디오파에 대해 비확산 매개물로 존재하므로 대기권에 대한 전자파의 전달은 주파수에 무관하게 되며, 이주파 수신기를 이용해도 소거 불가능 • 대류권 모델 • Saastamoinen, Modified Hopfield, Hopfield • 10~20cm의 정확도로 대류권 지연량 결정
GPS 시스템 오차 -계속- • SA(Selective Availability) • 적대국의 GPS 사용을 제한하기 위해 C/A 코드에 인위적으로 궤도오차 및 시계오차를 첨가 • 전세계적으로 폭발적인 증가를 보인 GPS의 민간수요에 따라 SA 해제에 대한 필요성 꾸준히 제기 • 유럽을 중심으로 계획되고 있는 새로운 위성항법시스템인 갈릴레오(GALILEO) 프로젝트에 대한 대응 • 2000년 5월 2일 SA 해제
GPS 시스템 오차 -계속- • SA에 따른 위치정확도 변화
GPS 수신기 오차 • 수신기 Channel Noise • 수신기 자체가 갖는 전기적 잡음 • Calibration 과정을 통해 channel biases 결정하고 모든 연속적 측정값에 이를 적용
GPS 수신기 오차 -계속- • 다중경로(Multi-path) • 측지용 수신기는 안테나에 Ground-Plane을 장착하고 있어 이러한 영향 최소화함 • 가장 이상적인 방법은 다중경로의 원인이 되는 장애물에서 멀리 떨어져 관측
V DOP(Dilution of Precision) • 수신기와 위성들간의 상대적인 위치관계를 계산 • GPS 수신기가 계산하는 측위 결과의 정도(Qualility)를 가늠케하는 지수 • 다른 차원(Dimensions)으로도 표시 가능 • 예: GDOP, PDOP, HDOP, VDOP, TDOP DOP h C / V
V DOP(Dilution of Precision)-계속- • 수신기와 위성들간의 상대적인 위치관계를 계산 • GPS 수신기가 계산하는 측위 결과의 정도(Qualility)를 가늠케하는 지수 • 다른 차원(Dimensions)으로도 표시 가능 • 예: GDOP, PDOP, HDOP, VDOP, TDOP DOP h C / V
DOP(Dilution of Precision)-계속- • 추적위성수(Satellite Visibility)와 DOP의 관계를 이용해 GPS 관측이 양호한 시간대 계산 가능