Download

1 / 40
460 likes | 972 Views
Crash Modification Factors & Functions. Spring 2013. Crash Modification Factors. Crash modification factors (CMFs) are becoming increasing popular: Simple multiplication factor Used for estimating safety improvement programs (countermeasures)

E N D
Crash Modification Factors & Functions Spring 2013
Crash Modification Factors • Crash modification factors (CMFs) are becoming increasing popular: • Simple multiplication factor • Used for estimating safety improvement programs (countermeasures) • Also known as Crash Reduction Factors (more positive) • Many states have developed CMFs • NCHRP Project 17-25 • HSM and SafetyAnalyst will include numerous CMFs
Crash Modification Factors • http://www.cmfclearinghouse.org/ • http://safety.fhwa.dot.gov/tools/crf/resources/fhwasa10032/
History about CMFs Highway Safety Act of 1966 required DOTs to implement safety improvement programs (SIP) 1960s NCHRP Project 17-2A proposed a model methodology for programming safety improvements. Report 162 recommended using a simple before-after study for developing CMFs (called CRFs at the time) 1970s 1990s - now Numerous research projects conducted on the development of CMFs
General Framework Crash Modification Factor A CMF is a multiplicative factor used to compute the expected number of crashes after implementing a given countermeasure at a specific site. The CMF is multiplied by the expected crash frequency without treatment. A CMF greater than 1.0 indicates an expected increase in crashes, while a value less than 1.0 indicates an expected reduction in crashes after implementation of a given countermeasure. For example, a CMF of 0.8 indicates an expected safety benefit; specifically, a 20 percent expected reduction in crashes. A CMF of 1.2 indicates an expected degradation in safety; specifically, a 20 percent expected increase in crashes.
General Framework Crash Modification Factor Example The CMF for installing a traffic signal at a rural stop-controlled intersection is 0.23 for angle crashes (Harkey et al., 2008). If a specific stop-controlled intersection is to be converted to a signalized intersection and the expected number of crashes at this intersection is 6.24 angle crashes per year, the expected crash frequency after signalization would be equal to 6.24*0.23 = 1.44 angle crashes per year. Stated in terms of the expected change in crashes, the CMF indicates a 77 percent (i.e., 100*(1 – 0.23)) expected reduction in angle crashes after the installation of a traffic signal.
General Framework Crash Modification Function A CMFunction is a formula used to compute the CMF for a specific site based on its characteristics. It is not always reasonable to assume a uniform safety effect for all sites with different characteristics (e.g., safety benefits may be greater for sites with high traffic volumes). A countermeasure may also have several levels or potential values (e.g., improving intersection skew angle, or widening a shoulder). A crash modification function allows the CMF to change over the range of a variable or combination of variables. Where possible, it is preferable to develop CMFunctions as opposed to a single CMF value since safety effectiveness most likely varies based on site characteristics. In practice, however, this is often difficult since more data are required to detect such differences.
General Framework Crash Modification Function
General Framework Standard Error The standard error is the standard deviation of a sample mean. The standard error provides a measure of certainty (or uncertainty) in the CMF. A relatively small standard error, with respect to the magnitude of the CMF estimate, indicates greater certainty in the estimate of the CMF, while a relatively large standard error indicates less certainty in the estimate of the CMF. The standard error is used in the calculation of the confidence interval. In some cases, the variance of the CMF may be reported instead of the standard error. The standard error is simply the square root of the variance as shown in equation below.
General Framework Confidence Interval A confidence interval is another measure of the certainty of a CMF. A CMF is simply an estimate of the actual safety effect of a countermeasure based on observations from a sample of sites. The confidence interval provides a range of potential values of the CMF based on the standard error. As the width of the confidence interval increases, there is less certainty in the estimate of the CMF. If the confidence interval does not include 1.0, it can be stated that the CMF is significant at the given confidence level. If, however, the value of 1.0 falls within the confidence interval (i.e., the CMF could be greater than or less than 1.0), it can be stated that the CMF is insignificant at that confidence level. It is important to note insignificant CMFs because the treatment could potentially result in 1) a reduction in crashes, 2) no change, or 3) an increase in crashes. These CMFs should be used with caution (AASHTO, 2010).
General Framework Confidence Interval A confidence interval is calculated by multiplying the standard error by a factor (i.e., the cumulative probability) and adding and subtracting the resulting value from the CMF estimate. The equation below is used for calculating the confidence interval. Confidence Interval = CMF ± (Cumulative Probability * Standard Error)
General Framework Crash Modification Factor Example The CMF for a given countermeasure is 0.761 with a standard error of 0.168. An engineer would like to calculate the 95 percent confidence interval for this CMF. The first step is to determine the appropriate cumulative probability factor from Table 1, given the desired confidence interval. The factor for a 95 percent confidence interval is 1.960. The 95 percent confidence interval is then calculated by adding and subtracting 1.96 times the standard error of 0.168 from the CMF estimate of 0.761. 95% Confidence Interval = 0.761 ± 1.960(0.168) This gives a confidence interval of 0.432 to 1.090. Note the value of 1.0 lies within the confidence interval. As such, it cannot be stated with 95 percent confidence that the true value of the CMF is not 1.0 (i.e., it cannot be stated with 95 percent confidence that the treatment had any effect).
General Framework Crash Modification Factor CMFs can be used by several groups of transportation professionals for various reasons. The primary user groups include highway safety engineers, traffic engineers, highway designers, transportation planners, transportation researchers, and managers and administrators. CMFs can be used to: • Estimate the safety effects of various countermeasures. • Compare safety benefits among various alternatives and locations. • Identify cost-effective strategies and locations in terms of crash effects. • Check reasonableness of evaluations (i.e., compare new analyses with existing CMFs). • Check validity of assumptions in cost-benefit analyses.
General Framework CMF is defined as: = expected number of crashes with a treatment or improvement. = expected number of crashes without a treatment or improvement. Note: a number above one implies that an increase in expected number of crashes is observed between sites with treatment and without treatment
General Framework Application for single improvement: = expected number of crashes before a treatment or improvement is implemented. (note: also called base condition) = expected number of crashes after a treatment or improvement is implemented. Note: Application for multiple improvements:
Methods of Estimation • Simple/Naive Before-After Study • Before-After Study with Control Group • Before-After Study with EB method • Cross-sectional study • Case-control study • Cohort study • Meta-Analysis • Expert Panel • Coefficients of regression models
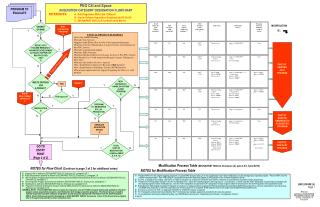
EXAMPLE Source: Harwood et al. 2000 FHWA Report-RD-99-207
Developing CMFs • How were units sampled for the study? • Do the data collected in the study refer directly to the outcome of interest or to aggregated data? • Was crash or injury severity specified? • Were study results tested for statistical significance or their statistical uncertainty otherwise estimated? • Did the study use appropriate techniques for statistical analysis? • Can the causal direction between treatment and effect be determined? • How well did the study control for confounding factors? • Did the study have a clearly defined target group, and were effects found in the target group only? • Are study results explicable in terms of well-established theory?
Applications in Highway Design • Evaluation of Design Safety • Evaluation of Design Exceptions • Evaluation of Design Consistency
APPLICATION Highway Design A 3-mile two-lane rural highway segment linking two cities is being designed. This segment contains one tangent section without any vertical curves. The lane and shoulder widths for the initial proposed design are 12 ft and 5 ft respectively. The traffic volume is estimated at 5,000 vpd. The designer has also identified an alternative design, which consists of having 10-ft lanes with 7-ft shoulders. All other conditions are the same for both designs. Determine the change in safety between the initial and alternative designs.
APPLICATION Step 1: Estimate the Expected Number of Crashes for the Base Conditions Statistical model taken from upcoming Highway Safety Manual: 12-ft lanes and 6-ft shoulder widths
APPLICATION Step 2: Adjust Base Conditions to Reflect Existing Design AMF taken from figure shown earlier.
APPLICATION Step 3: Specify Design Change and Identify Appropriate CMFs
APPLICATION Step 4: Compute Safety Change
Issues with CMFs • Relationship between CMFs and base conditions • CMF is used to adjust for change in condition A to B • The assumption is that B is not represented in the base model parameter • Difficult to determine whether the condition B was included in the original statistical model
Issues with CMFs • Observed Crash Counts (EB) • Not valid for a substantial change in highway design (between different alternatives) • Cannot be used for design exceptions • Combination of Improvements • CMFs are assumed to be independent • In reality, highway improvements from which the CMFs are estimated include several design elements changes simultaneously. • In addition, CMFs are probably not independent (shoulder width versus lane width)
Issues with CMFs • Constant versus function • Current CMFs are independent of exposure • Not true, if we assume a non-linear relationship between safety and traffic flow • Crash Severity and Crash Type • Certain improvements can also influence crash severity or types. • Current CMFs do not consider changes in severity
Issues with CMFs • Crash Migration • Def: Interventions influencing crashes at adjacent sites (note: could also be for different time periods or crash type) • CMFs do not factor in crash migration • Statistical Inferences • Most research do not provide confidence intervals • High uncertainty/high reduction versus low uncertainty/low reduction • Now, researchers have started to provide information about the variance. • Expert Panels/Meta-Analysis • Subjective estimation (panel) • Panel does not know characteristics of data (both) • No confidence intervals available (panel)
Base Models + CMFs Calculating the variance for the product of SPFs + CMFs Based on the theory of Independent Random Variables where, • = the product of independent random variables; and, • = random variable taken from any kind of distribution. It should be pointed out that the mean and variance estimates are defined as and (second central moment), respectively. See Lord, D. (2008) Methodology for Estimating the Variance and Confidence Intervals of the Estimate of the Product of Baseline Models and AMFs. Accident Analysis & Prevention, Vol. 40, No. 3, pp. 1013-1017.
Base Models + CMFs Mean of a Product
Base Models + CMFs Variance of a Product Note: for
Base Models + CMFs Comparison: Full Model: Baseline Model: SCENARIO 1 − 12-ft lanes, 8-ft shoulders, 4 curves/mile SCENARIO 2 − 12-ft lanes, 12-ft shoulder width, and 1 curve/mile
Base Models + CMFs Comparison – Scenario 1 (KAB):
Base Models + CMFs Comparison – Scenario 1 (KABCO):
Base Models + CMFs Comparison – Scenario 2 (KAB):
Base Models + CMFs Comparison – Scenario 2 (KABCO):
Base Models + CMFs Comparison Lord, D., P.-F. Kuo, and S.R. Geedipally (2010) Comparing the Application of the Product of Baseline Models and Accident Modification Factors and Models with Covariates: Predicted Mean Values and Variance. Transportation Research Record 2147, pp. 113-122.