Download
1 / 1
10 likes | 395 Views
Master-K 를 이용한 PTP(Point-To-Point) 로봇 제어. Robot 의 기능. 자기유지 필요 모터를 계속 ON 시키기 위하여. 6 개의 센서의 점등방식 P000 (p040 모터 off 상태 on) P001 (p040 모터 on 상태 on) P002 (p041 모터 off 상태 on) P003 (p041 모터 on 상태 on) P004 (p042 모터 off 상태 on) P005 (p042 모터 on 상태 on) P006 ( 시작 버튼 )

E N D
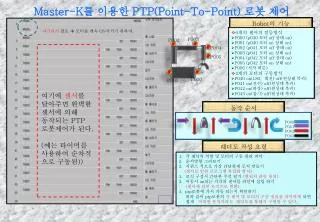
Master-K를 이용한 PTP(Point-To-Point) 로봇 제어 Robot의 기능 자기유지 필요 모터를계속 ON시키기 위하여. • 6개의 센서의 점등방식 • P000 (p040 모터 off 상태 on) • P001 (p040 모터 on 상태 on) • P002 (p041 모터 off 상태 on) • P003 (p041 모터 on 상태 on) • P004 (p042 모터 off 상태 on) • P005 (p042 모터 on 상태 on) • P006 (시작 버튼) • 4개의 모터의 구동방식 • P040 on(180。회전) off(원상태 복귀) • P041 on(전진) off(원상태 복귀) • P042 on(하강) off(원상태 복귀) • P043 on(잡기) off(원상태 복귀) P003 P002 P004 P005 여기에 센서를 달아주면 완벽한 센서에 의해동작되는 PTP 로봇제어가된다. (예는 타이머를 사용하여 순차적으로 구동됨)) P000 P001 동작 순서 P040 P041 P042 P043 래더도작성 요령 각 센서의 역할 및 모터의 구동 원리 파악 순서방향 그려보기 시퀸스 적으로 가장 간단하게 로직만들기 (센서로 인한 프로그램 복잡화 방지) 로직구성시 간단한 주석 달기 (현위치 파악 용의) 이동시on되는 각각의 센서를 라인에 삽입 하기 (센서에 의한 로직으로 변환) 3. ptp로봇에 가서 작동 되는지 확인하기 위와 같이 ptp로봇의 각 센서 및 모터의 구동 원리를 파악하게 되면 쉽게 어떠한 동작이라도 래더도를 통해서 구현할 수 있다..