Download
1 / 16
160 likes | 319 Views
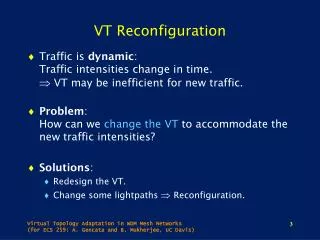
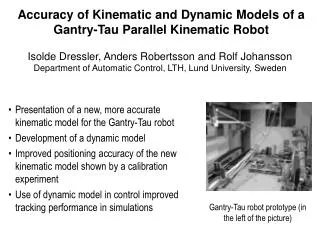
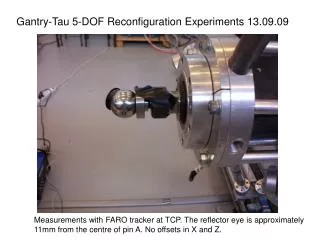
Gantry-Tau 5-DOF Reconfiguration Experiments 13.09.09. Measurements with FARO tracker at TCP. The reflector eye is approximately 11mm from the centre of pin A. No offsets in X and Z. Gantry-Tau 5-DOF Reconfiguration Experiments 13.09.09. Reconfiguration from “All Right” to “All Left”.

E N D
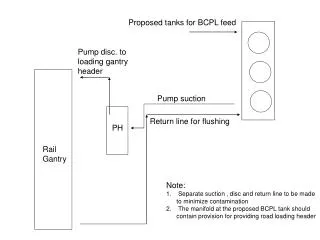
Gantry-Tau 5-DOF Reconfiguration Experiments 13.09.09 Measurements with FARO tracker at TCP. The reflector eye is approximately 11mm from the centre of pin A. No offsets in X and Z.
Gantry-Tau 5-DOF Reconfiguration Experiments 13.09.09 Reconfiguration from “All Right” to “All Left”
Gantry-Tau 5-DOF Reconfiguration Experiments 13.09.09 Actuator measurements 000-111 (see file Q0_1.mat)
Gantry-Tau 5-DOF Reconfiguration Experiments 13.09.09 X,Y,Z measurements from tracker. Matt: I forgot to “home” the robot exactly, so you need to calculate the starting position of actuators 1,2,3 from the I.K. The telescopes are initialised OK, ie. 1.09m, 1.25m, 1.25m
Gantry-Tau 5-DOF Reconfiguration Experiments 13.09.09 Actuator measurements 111-000 (see file Q0_1.mat)
Gantry-Tau 5-DOF Reconfiguration Experiments 13.09.09 X,Y,Z measurements from tracker. Matt: I forgot to “home” the robot exactly, so you need to calculate the starting position of actuators 1,2,3 from the I.K. The telescopes are initialised OK, ie. 1.09m, 1.25m, 1.25m