Download
1 / 1
10 likes | 105 Views
Explore the key property of multi-robot patrolling: the frequency of visits at locations. Learn about area patrol strategies including uniform frequency and maximal frequency based on path constraints. Discover algorithms that find minimal-time cycles under terrain directionality and velocity constraints. Ensure robust, maximal, and uniform frequency in multi-robot patrol operations.

E N D
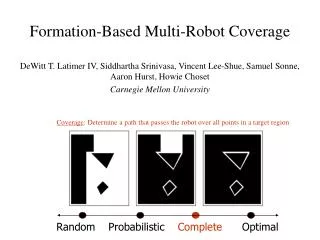
Multi-Robot Area Patrol under Frequency ConstraintsYehuda Elmaliach, Noa Agmon and Gal A. KaminkaThe MAVERICK GroupDepartment of Computer Science, Bar Ilan University Key property of multi-robot patrolling: Frequency of visits at locations Area patrol: • Uniform frequency if robots move along circular path • Maximal frequency if time to complete cycle is minimal Contributions: • First algorithm finds minimal-time cycle under terrain directionality and velocity constraints • Second algorithm positions robots uniformly along the cycle in minimal commute time We guarantee robust, maximal, uniform frequency in multi-robot patrol