Download
1 / 16
160 likes | 313 Views
Diagnosing Hybrid Systems: A Bayesian Model Selection Approach. Sheila McIlraith Knowledge Systems Lab Stanford University. Problem Statement. Task: Diagnose continuous systems w/ embedded supervisory controllers. Given: a hybrid representation of system behavior,

E N D
Diagnosing Hybrid Systems:A Bayesian Model Selection Approach Sheila McIlraith Knowledge Systems Lab Stanford University
Problem Statement Task: Diagnose continuous systems w/ embedded supervisory controllers. Given: • a hybrid representation of system behavior, • a history of executed controller actions, and • a history of observations, including an observation of aberrant behavior, Determine: what components failed and their associated parameter values. Assumptions: • discrete time observations and state estimation • hybrid system model contains no autonomous jumps, • fault occurrence is abrupt, • failure of component may be partial or full. Approach: Hybrid diagnosis as Bayesian model selection [MacKay,91] • Qualitative analysis to reduce and focus search space. • Quantitative analysisvia Bayesian tracking and model selection.
Illustrative Example NASA Sprint AERCam Robotic camera unit with 12 thrusters, T1-T12, that enable both linear and rotational motion. Discrete Mode Transitions • thrusters turn on and off Continuous Newtonian Dynamics • point mass, m, at position (x,y,z), with translational and angular velocities: V = (u,v,w) and= (p,q,r) : d(mV)/dt = F + 2m (Vx) Vdm/dt + m dV/dt = F - 2m( x V) • For each coordinate du/dt = Fx /m -2(qw - vr) - (u/m) * dm/dt dv/dt = Fy /m -2(ru - pw) - (v/m) * dm/dt dw/dt = Fz /m -2(pv - uq) - w/m) * dm/dt Simulated in HCC(Hybrid Concurrent Constraint language) [Alenius and Gupta ‘98]
Hybrid System Representation Hybrid System< M, X, , V, f ,COMPS>, M– discrete modes Mcomprising: - behavior mode of system - fault mode of component [¬] ab(c), for every c in COMPS. X RN – continuous state vector, x X – discrete action inputs, that cause mode transitions, C – controller actions E – exogenous actions. V RV – continuous inputs f– system dynamics function f: M xX xxVxRM M x X . (t+1,xt+1) = f (t, xt, t, vt , wt) • Model s =(, ), • a time-indexed sequence of modes and parametersst=(t,t).
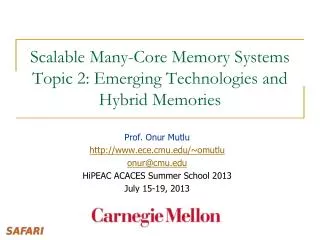
observations Qualitative Monitoring & Diagnosis Plant controller actions Controller Bayesian Tracker Architecture
Behavior modes: accelerate-x, cruise-x, decelerate-x, accelerate-y, cruise-y, ... y x point of failure point of detection desired trajectory actual trajectory • Task: Given controller action history, A and observation history,O determine the model s = (, ) that best fits the data. parameter values behavior mode & (failed) components Example Scenario
y x point of failure point of detection desired trajectory actual trajectory Example Scenario Behavior modes: accelerate-x, cruise-x, decelerate-x, accelerate-y, cruise-y, ... Model 1: s = (, ) behavior (failed) components parameter values . . . ([accelerate-x, ab(T2), ¬ab(T1,T3,…,T12)], [20, 100, 100, … , 100]) ([cruise-x, ab(T2), ¬ab(T1,T3,…,T12)], [20, 100, 100, … , 100]) ([decelerate-x, ab(T2), ¬ab(T1,T3,…,T12)], [20, 100, 100, … , 100]) ([accelerate-y, ab(T2), ¬ab(T1,T3,…,T12)], [20, 100, 100, … , 100]) . . .
y x point of failure point of detection desired trajectory actual trajectory Example Scenario Behavior modes: accelerate-x, cruise-x, decelerate-x, accelerate-y, cruise-y, ... Model 2: s = (, ) behavior (failed) components parameter values . . . ([accelerate-x, ¬ab(T1,…,T12)], [100, 100, 100, … , 100]) ([cruise-x, ¬ab(T1,…,T12)], [100, 100, 100, … , 100]) ([decelerate-x, ¬ab(T1,…,T12)], [100, 100, 100, … ,100]) ([accelerate-y, ab(T6),¬ab(T1,..,T5,T7…,T12)], [100, ..., 100, 33, …,100]) . . .
Approach: Bayesian Tracking & Model Selection Determine the posterior probability distribution over models and model parameters, given the system observations p(model | observations) p(observations | model) p(model) posterior likelihood prior • Challenges: • nonlinear dynamics • multiple models multimodal distribution How do we represent and propagate complex multimodal distr’ns? • Represent the posterior distribution as discrete samples and propagate the distribution through time using particle filtering • [Gordon et al., 93] , [Isard and Blake, 98].
Hence, • p(st | Ot )= k p( obst| st) p(st | Ot-1 ) • posterior likelihood temporal prior • where • st=(t,t) is the model at time t, • obst is the vector of observations at time t, • Ot = (obstobst-1,…,obs0) is the observation history to time t. Bayesian Tracking • Markov assumption for temporal dynamics • p(st | st-1,…, s0) = p(st | st-1)
p(st | st-1) temporal dynamics p(st | Ot-1 ) fair random sample of temporal prior Particle Filtering [Gordon et al., 93], [Isard and Blake, 98] p(st-1 | Ot-1 ) posterior at t-1 p(obst| st) likelihood p(st | Ot ) posterior
Focusing Bayesian Tracking • Problem: • state space is sparsely sampled • large number of potential models • delayed manifestation of faults • fault modes are unexpected low prior
observations Qualitative Monitoring & Diagnosis Plant controller actions Controller Bayesian Tracker Architecture
Focusing Bayesian Tracking • Problem: • state space is sparsely sampled • large number of potential models • delayed manifestation of faults • fault modes are unexpected low prior • Solution: • Exploit qualitative reasoning techniques to identify models, • “candidate qualitative diagnoses” that are qualitatively consistent • with the observation history • Use candidate qualitative diagnoses to bias the temporal prior • reduced search space • focus sampling on consistent diagnoses p(st | Ot, oracle)= k p( obst| st , oracle) p(st | Ot-1 , oracle) posterior likelihood temporal prior
Qualitative Diagnosis ‘Oracle’ • Qualitative (linearized) representation in terms of temporal causal • graphs [Mosterman & Biswas, 99]. • Qualitatively propagate aberrant behavior back through time to generate candidate failed components • Qualitatively propagate candidate diagnoses forward to generate • model at time t -- (t,t). • Output is a set of weighted candidate models at time t, st=(t, t). • Weights favor minimal diagnoses and have a temporal discounting.
Summary Task: Diagnose continuous systems w/ embedded supervisory controllers. • Approach: Bayesian tracking and model selection • Challenge: • How to represent & propagate complex multimodal distributions. • How to predict unlikely events (component failure). • Solution: • Represent the posterior distribution as discrete samples. • Propagate the distribution through time using particle filtering. • Exploit qualitative monitoring and diagnosis techniques to reduce • search space and focus on qualitatively consistent models.