Download
1 / 18
180 likes | 202 Views
This paper delves into the rationale behind instantaneous linearization for control design and its application in linear model extraction from neural networks. Discusses controller implementation and key considerations for system control.

E N D
Control Based on Instantaneous Linearization Eemeli Aro eemeli.aro@tkk.fi 16.11.2005
Structure • Rationale • Instantaneous linearization • Controller implementation • Discussion
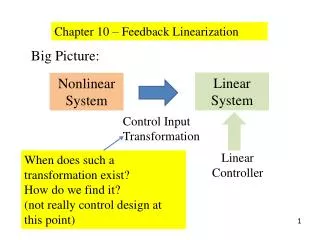
Rationale • Linear control better understood than nonlinear control • Many well-established linear design techniques exist • Linearization only valid in a limited operating range • Extract a linear model from the current sample
Instantaneous linearization Assume a deterministic neural network input-output model is available with a regression vector which is interpreted to define the state of the system
Instantaneous linearization Then linearize g around (t=) to get an approximate model where
Instantaneous linearization Separating components of the current regression vector () into a bias term () : where
Instantaneous linearization The coefficients {ai} and {bi} are collected into the polynomials Thus the approximate model can be seen as a linear model affected by a constant disturbance ()
Instantaneous linearization For a multilayer perceptron network with one hidden layer on tanh units and a linear output,
Linearized model parameters Extract linear model Control design Controller Parameters Reference Input Output Controller System Application to Control
Application to Control • At each sample, extract a linear model from a neural network model of the system and design a linear controller • Can be seen as a gain scheduling controller with an infinite schedule
Application to Control • Structurally equivalent to an indirect self-tuning regulator, only difference is in how the linear model is extracted • Control design based on certainty equivalence principle – the controller is designed assuming that the linear model perfectly describes the system
Application to Control • Can implement any linear control design • Need to compensate for bias term () • e.g. by using integral action, which also compensates for other constant disturbances • Need to keep in mind narrow operating range of linearized model
Application to Control • Pole placement design • Assuming a linearized deterministic model • The objective is to select the three polynomials R, S, and T so that the closed loop system will behave as
reference + input output – System Application to Control
Application to Control • Minimum variance design • For regulation, not trajectory following • Design the controller to minimize a criterion J(t) • Generalized Minimum Variance controller where P, W and Q are rational transfer functions
Discussion • Pro • Allows the use of linear design techniques • Reasonably simple implementation • Fast; linearization & design can be done between samples • Allows control of systems with unstable inverses (with approximate pole placement controller design without zero cancellation) • Can be used to understand the dynamics of the system (poles, zeros, damping, natural frequency)
Discussion • Con • Linearized model often valid only in a narrow range • Can’t deal with hard nonlinearities • Requires understanding on linear control theory
References • M. Nørgaard, O. Ravn, N. K. Poulsen, and L. K. Hansen, "Neural Networks for Modelling and Control of Dynamic Systems," Springer-Verlag, London, 2000 • O. Ravn, "The NNCTRL Toolbox. Neural networks for control", Version 2, Technical University of Denmark, 2003, http://www.iau.dtu.dk/research/control/nnctrl.html