Pendahuluan
Pendahuluan Pada pembahasan sebelumnya, telah dikembangkan rumus untuk parameter kinerja sistem order-dua : Prosentase overshoot (% OS ), Time-to-peak ( T p ), Settling-time ( T s ), dan Rise-Time ( T r ) dalam konteks parameter order-dua dan n .

Pendahuluan
E N D
Presentation Transcript
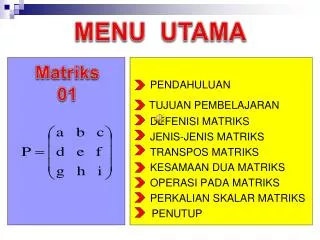
Pendahuluan Pada pembahasan sebelumnya, telah dikembangkan rumus untuk parameter kinerja sistem order-dua : Prosentase overshoot (%OS), Time-to-peak (Tp), Settling-time (Ts), dan Rise-Time (Tr) dalam konteks parameter order-dua dan n. Pada bagian ini, pengembangan karakteristik kinerja akan ditutup dengan mem- bahas cara menemukan lokasi pole sistem, yang dapat digunakan untuk menentukan kinerja rinci dari sistem Bagian 9
4.6. Menghubungkan Spesifikasi Respons dengan Lokasi Pole Pada Bidang - s Sebelumnya telah dijelaskan mengenai hubungan antara spesikasi peak-time, rise-time, settling-time, dan prosentase overshoot terhadap frekuensi natural dan rasio damping dari sistem order-ke dua underdamped. Selanjutnya hal ini perlu dihubungkan dengan lokasi pole pada bidang - s. Jika hal ini dilakukan, kita dapat menentukan lokasi pole yang memenuhi respons tertentu. Dengan demikian kita dapat memecahkan masalah yang dinamakan masalah "sintesis". Plot pole dari sistem order-ke dua underdamped kembali diperlihatkan pada slide 1. Mudah untuk melihat jarak radial antara titik origin dengan pole, yaitu n dan sudut antara garis radial dan sumbu - x negatif adalah = cos-1. Bagian 9
Slide 1 Plot Pole untuk sistem order-dua underdamped Plot Pole untuk sistem order-dua underdamped bidang - s Bagian 9
Sebelumnya, untuk menentukan lokasi pole, digunakan simbol d (damped natural frequency) untuk bagian imajiner dari pole dan d (exponential decay frequency). Dari lokasi pole diketahui bahwa : dan dengan demikian, dalam konteks lokasi pole : Bagian 9
Persamaan (1) menunjukkan bahwa Tp berbanding terbalik terhadap besarnya bagian imajiner dari pole. Karena garis horisontal pada bidang-s merupakan bagian imaginer konstan, maka mereka merupakan garis peak-time konstan. • Persamaan (2) juga menunjukkan bahwa Tsberbanding terbalik terhadap bagian realdari pole. Dengan demikian, garis vertikal pada bidang-s, yang merupakan bagianreal konstan, merupakan garis-garis settling-time konstan. • Selanjutnya, karena = cos , maka garis-garis radial merupakan garis konstan dari .Karena prosentase overshoot hanya merupakan fungsi , maka garis-garis radial jugamerupakan garis konstan overshoot. • Akhirnya, persamaan pendekatan n = 1.8/Tr secara tidak langsung menyatakanbahwa kurva frekuensi natural konstan (setengah lingkaran dengan radius = n)berhubungan dengan respon dalam rise-time konstan. Terlihat lagi bahwa Trberbanding terbalik terhadap n. Hal-hal di atas dapat ditunjukkan dalam bentuk kurva peak-time, settling-time, rise-time konstan dan prosentase overshoot. (Slide 2) Bagian 9
Slide 2 Bagian 9
4.6.1 Efek Pemindahan Pole Sepanjang Kurva Disain Slide 3 Pada slide 3 di atas, step-respons untuk sistem yang pole-pole-nya dipindahkan, tidak mengubah d. Jika pole dijauhkan dari sumbu real, frekuensi d naik, tapi amplop eksponensial e- Bagian 9
4.6.1 Efek Pemindahan Pole Sepanjang Kurva Disain Slide 3 Pada slide 3 di atas, step-respons untuk sistem yang pole-pole-nya dipindahkan, tidak mengubah d. Jika pole dijauhkan dari sumbu real, frekuensi d naik, tapi amplop eksponensial tidak berubah. Jadi, settling-time secara virtual tidak berubah walaupun prosentasi overshoot naik karena penurunan damping. Bagian 9
Slide 4 Pada slide 4 di atas, terlihat efek pemindahan pole ke kiri dengan d konstan. Terlihatbahwa frekuensi natural tidak berubah sehingga Tp konstan. Namun, semakin jauhpole bergeser ke kiri, proses peredaman (damping) akan meningkat, sehingga prosentaseovershoot berkurang dan osilasi teredam lebih cepat. Bagian 9
Slide 5 Pada slide 5, prosentase overshoot tidak berubah jika pole dijauhkan dari titik pusat.Sistem menjadi lebih cepat jika frekuensi natural dinaikkan. Bagian 9
Slide 6 Akhirnya, pada slide 6 terlihat bahwa pendekatan Tr = 1.8/n tidak cukup akurat. Jikapole dipindahkan sepanjang kurva konstanta n, rise-time mengalami perubahan yang cukup besar. Hal ini desebabkan karena turut berubahnya rasio peredaman (dampingratio). Namun demikian, hubungan antara kecepatan respons dan frekuensi naturaluntuk nilai tertentu, bisa diperoleh dari kurva perancangan seperti pada pembahasan sebelumnya. Bagian 9
Contoh 4.1Pole-pole untuk sebuah sistem order-dua beerada pada s = -3 j7.Tentukan respon sistem. Jawab : Dengan trigonometri = cos = cos (tan-1(7/3)) = 0.394. Frekuensi naturalnyaadalah n = (32+ 72)1/2 = 7.616. Peak-time - nya adalah Prosentase overshoot adalah : Pendekatan settling-time adalah : detik Untuk rise-time terlihat bahwa nTr 1.44 jika = 0.394. Jadi Tr 1.44/7.616 = 0.18 detik Bagian 9
Contoh 4.2 Untuk sistem mekanik rotasional seperti pada diagram mobilitas padagambar 1, tentukan nilai resistansi bantalan as R dan inersia J yang diperlukan agar posisi angular terhadap perubahan bertahap dalam torsi masukan1 Nm memberikan respon 20% overshoot dan settling-time 2 detik. Jawab : Dengan (s) sebagai keluaran, didapatkan sehingga fungsi transfer sistem menjadi Untuk overshoot sebesar 20% Bagian penyebut fungsi transfer sistem harus memenuhi : Selanjutnya, karena C = 0.2 dan 5/J = 18.93 J = 0.26 kg m2, R/J = 4 R = 1.06 Nm/(rad/s). Bagian 9