Download
1 / 27
290 likes | 671 Views
BeepBeep : A High Accuracy Acoustic Ranging System using COTS Mobile Devices. Chunyi Peng , Guobin Shen , Yongguang Zhang, Yanlin Li, Kun Tan Presented by Prithvi Raj. Overview. Traditional ranging systems BeepBeep ranging system System Architecture System Design Experiment results

E N D
BeepBeep: A High Accuracy Acoustic Ranging System using COTS Mobile Devices ChunyiPeng, GuobinShen, Yongguang Zhang, Yanlin Li, Kun Tan Presented by Prithvi Raj
Overview • Traditional ranging systems • BeepBeep ranging system • System Architecture • System Design • Experiment results • Conclusion
Traditional TOA-based ranging system • Distance between sender and receiver is product of time of flight and propagation speed of signal. • Choice of signal: radio, light, acoustic (error of 30cm per 1ms error) • Clock synchronization uncertainty () • reason: clock skews and drifting between two clocks • GPS for clock synchronization • round trip • Sending uncertainty () • arbitrary delay after output command is issued till sound signal comes out from speaker • reasons: software delay, system load, speaker architecture • Receiving uncertainty () • arbitrary delay of sound signal arrival being recognized • reasons: real-time control, software delay, interrupt handling delay, system load
(+) • Experiment to find out a lower bound for (+), if a TOA measurement is done in software. • COTS mobile phone(HP iPAQ rw6828) • Time of flight negligible by placing microphone and earphonetogether
Ranging Protocol • Each device has a WiFi radio • Initiation: A ranging process is started by an initiating device, which calculates and disseminates a schedule in an initiation message to all the devices that participate in the ranging process • Sensing: Each device calculates a delay according to the schedule and sets a timer. Upon the timer expires, it emits a sound signal. • ETOA exchanging: After the last device has emitted the sound signal, each device processes the recorded signals and determine ETOA between its own signal and signals from all other devices. These ETOA values are packed into one packet broadcast to other devices. Upon receiving EOTA information from all other devices one device can calculate the distance to all other devices.
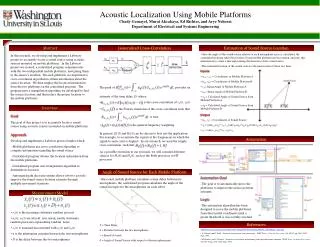
BeepBeep Ranging Mechanism Assumption: Both devices A and B are in recording state. • Two way sensing: First device A, emits sound signal which is recorded by recorders of both A and B. Then after some time, B does same thing. • Both devices examine their recorded data and locate the sample points when previously emitted two signals arrived. And calculate ETOA(elapsed time between two signals) • A and B, exchange locally computed ETOAs. And based on this two ETOAs, distance between two devices is calculated
ETOA Determination • Received sound signal is always sampled at a fixed sampling frequency() • To calculate ETOA, instead of system clock to tell the timestamps of arrival of both the signal, we rely on samples by recording module. • EOTA=(number of samples between first sample points of each of two signals )/
Signal Detection • Signal is detected by correlating with the reference signal. • Cross correlation is a measure of similarity of two waveforms as a function of a time lag applied to one of them. • Maximum “peak” is located and this is considered as a point when the signal arrived by the property of autocorrelation. • , ,=100, =3db=2
Multipath Effect • Sharpness: level of peak regarding to it’s surrounding side-lobes • Cross correlation values from difference path s should have same sharpness value • First peak which has comparable sharpness is the maximum “peak” • , w1=100
BeepBeep Advantages • Clock synchronization is eliminated by using two way sensing • No local clock of end system or time-stamping is required • Sending uncertainty is removed as we don’t use instance when sound is sent • Receiving uncertainty by measuring ETOA using samples and as is constant • No instantaneous signal detection required • Signal detection can be done offline and hence complex signal processing techniques can be applied to detect the signal • Granularity proportional to c/, in typical setting granularity = 0.77cm
Sources of error • In c (speed of signal): Temperature and humidity • Drifting of sampling frequency • Signal to noise ratio(SNR): communication channel, environment noise, energy • Multipath effects: reverberation, indoor settings • Signal distortion: limited spectrum band(around 3kHz), attenuation outside this band.
Signal design • Good autocorrelation property • Good Frequency response near human voice range(2-8kHz) • Length: 50cm : tradeoff between good SNR and multipath effect
Performance Matrices • Accuracy: difference between ranging results and real distances • minimum / maximum / medium error / standard deviation • absolute value /percentage to real distance • α-Confidence: percentage of times accuracy level α is achieved • Operational range: it is maximum range that ranging system can still achieve accuracy level α with confidence β.
Test case design • Quiet indoor: room(5mx11m) () • Noisy Indoor:(noise of AC, music, chatting)() • Outdoor, car park() • Outdoor, subway station() • Failed experiments (accuracy>20cm or 3db) not included • K=3cm and 8cm respectively • COTS mobile device used are • 50 times for each setting • LOS ensured
Experiment Results CASE A: Quiet indoor
Experiment Results CASE B: Noisy Indoor
Experiment Results CASE C: Outdoor car park
Experiment Results CASE D: Outdoor subway station
Experiment Results Cumulative distribution function of the α-confidence
Experiment Results • Using earphones instead of speaker • Earphones have less signal power but larger operational range than speaker • So we compare effect of SNR VS effect of signal distortion(CASE A)
Experiment Results • Earlier experiment with speakers for CASE A
Experiment Results • Finding out effectiveness of multipath effect mitigation effort
Conclusion • BeepBeep eliminates uncertainties related to clock synchronization, sending and receiving • No local clock timestamp required • No dedicated hardware required • Implemented totally in software and in user space • Using COTS devices