Grip-Free Accelerometer Controller for Enhanced Accessibility in Gaming and Vehicle Operation
This project presents an innovative glove-integrated sensor that detects hand orientation using an analog 2-axis accelerometer for versatile control of applications like gaming and vehicle operation. Designed to be a flexible and dynamic alternative to traditional joysticks, the prototype aims to assist disabled individuals by eliminating the need for gripping while providing customizable sensitivity. The system includes two graphical simulations to demonstrate its practicality and can be integrated wirelessly for broader applications, enhancing usability in confined spaces.

Grip-Free Accelerometer Controller for Enhanced Accessibility in Gaming and Vehicle Operation
E N D
Presentation Transcript
Accelerometer-Based, Grip-Free Controller Tyler (You-Chi) Le ECE4220 Fall 2011 Dr. DeSouza December 5th, 2011
A Quick Overview • What is the project? • A glove-integrated sensor that detects hand orientation using real-time tasks to provide control various applications • Aimed to demonstrate a flexible and dynamic alternative to the traditional controller and joystick • Prototype for demonstrations for both gaming and vehicular control for disabled persons • Two simulation programs demonstrate potential usage
Purpose • Provide a flexible, cheap, and dynamic controller for operation of vehicles, simulations, and games • Integrated with glove to replace fixed-shaped joysticks • Motion-based controls for ease of use • Configurable sensitivity to accommodate varying ranges of motion • Packaged with two graphical simulations to demonstrate potential usage and applicability
Motivation (Background) • For disabled individuals: • Current camera-based and optical motion sensors need min. distance and proper lighting, not appropriate for inside of cars or inside of confined spaces • Present joysticks are limited by design shape and have limited usability • Many joysticks require gripping an object rather than hand movement (May prove troublesome for people with lack of grip strength or finger damage/injuries) • Desire to provide a easy-to-configure, easy-to-use prototype for vehicle control (possibly for wheelchairs or cars)
Motivation Cont. • For video game control: • Game system controllers are limited by design shape and have limited usability in representing different types of motion • Minimum distance for optical sensors not applicable for PC’s as users have to be close to keyboard and mouse • Joysticks and driving wheels are costly and single-purposed
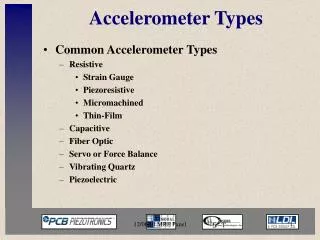
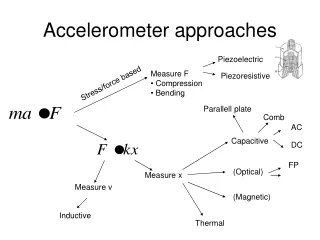
Proposed Implementation • Hardware: • Detect hand orientation using an analog 2-axis accelerometer • Accelerometer is affixed to top of glove, no finger grip necessary • Power drawn from TS-7250 DIO lines • TS-7250 on-board ADC measures analog output of accelerometer to measure tilt/orientation* *MAX197 Add-on is not available on TS-7250’s in lab
Integrated ADC on TS-7250 MAX197, not avail. In current lab TS-7250 Integrated ADC 5 Channels
Hardware Block Diagram 2-Axis Accelerometer ADC and TS-7250 Embedded System Linux Terminal Network Server
Proposed Implementation • Software: • Control registers for ADC as well as ADC results are mapped to the compiler using mmap() and provided addresses • Four pthreads initialize real-time tasks that operate in sequence to produce graphical simulations based on hand orientation • Real-time tasks operate with 0.1 second periods for 10 Hz axis measurements, simulation update, and graphic output • Character array-based graphics printed through the Linux Terminal for graphical output • User-configured range of motion at initialization for varying sensitivity
Proposed Implementation • Real-time (RT) Structure: • Two RT tasks poll the output of the 2-axis accelerometer and store result into two shared buffers • A third RT task reads from the shared buffers to update graphical positions of various simulation components • Fourth RT task prints the updated character arrays to the Terminal, producing the graphical display • Each task prevents the next successive task from execution before completion using semaphores
Software Block Diagram Update Graphics Measure H-Axis Shared Buffer Shared Buffer SEM1 SEM2 SEM3 Measure V-Axis Display Graphics
Real-Time Concepts Used • Pthreads – multithread operation • Periodic RT tasks • Semaphores • Shared buffer • Producer-Consumer Structure • I/O Polling • Priority Scheduling
Results • TS-7250 produces measurements and displays consistent with hand motion • Simulations demonstrate both practical usage and gaming application for proposed prototype • User-defined minimum and maximum values allow customizable range of motion • The prototype cost around $15 dollars excluding the TS-7250
Potential Improvements • Migrate functionality to the MAX197 Optional Add-on ADC for better accuracy and faster sampling • Better accuracy would result in better resolution, allowing smaller minimal range of motion • Expansion of buffer and threads to allow 6 axis, both-hands operation • Utilizing display drivers or programs that minimize processing speed to allow faster refresh rate • Implementation to prevent unintentional acceleration through averaging algorithms • Wirelessly integrate ADC and accelerometer
Potential Implementations • Placed on hand, head, and/or fingers to sense orientation for vehicular control for disabled persons • “Makeshift” joystick similar to Nintendo Wii controllers, but with no required physical hardware to grip • Robotics control • Transport what is already available on many mobile devices to larger-scale applications
Conclusion • Demonstrates a flexible and configurable prototype for a non-conventional controller • Provides a motion sensing module that does not require grip and holding an object • Potentially beneficial towards people with disabilities lacking a large range of motion or grip strength • Demonstrates potential to replace a wide variety of single-purpose video game joysticks (cost-saving) • Can be used in confined spaces on systems larger than mobile devices • Successfully demonstrates usage of real-time design in simulation and controller