Advancements in Robotics: From Kinematics to Vision
210 likes | 239 Views
Explore the world of robotics, delving into kinematics, trajectory planning, and the fascinating world of robot vision. Learn about the integral aspects of robotics and how they contribute to the development of intelligent machines.

Advancements in Robotics: From Kinematics to Vision
E N D
Presentation Transcript
What is Robotics • Robotics is a branch of AI, which is composed of Electrical Engineering, Mechanical Engineering, and Computer Science for designing, construction, and application of robots. • Robots are the artificial agents acting in real world environment • Robots are aimed at manipulating the objects by perceiving, picking, moving, modifying the physical properties of object, destroying it, or to have an effect thereby freeing manpower from doing repetitive functions without getting bored, distracted, or exhausted.
Aspects of Robotics • The robots have mechanical construction, form, or shape designed to accomplish a particular task. • They have electrical components which power and control the machinery. • They contain some level of computer program that determines what, when and how a robot does something.
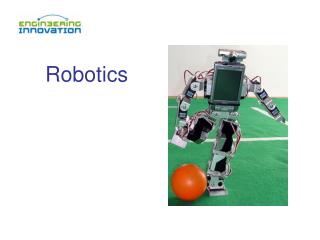
Robust Intelligence (RI) • The RI program advances and integrates the research traditions of artificial intelligence, computer vision, human language research, robotics, machine learning, computational neuroscience, cognitive science, and related areas. • These technologies are used to develop machines that can substitute for humans. Robots can be used in any situation and for any purpose, but today many are used in dangerous environments (including bomb detection and de-activation), manufacturing processes, or where humans cannot survive. Robots can take on any form but some are made to resemble humans in appearance. This is said to help in the acceptance of a robot in certain replicative behaviors usually performed by people. Such robots attempt to replicate walking, lifting, speech, cognition, and basically anything a human can do. Many of today's robots are inspired by nature, contributing to the field of bio-inspired robotics.
ROBOT KINEMATICS • Kinematics is the relationships between the positions, velocities, and accelerations of the links of a manipulator, where a manipulator is an arm, finger, or leg. • The transformation, between a coordinate frame located in the hand of the robot (known as the hand frame) and a coordinate frame located in the base of the robot (known as the base frame) . This transformation specifies the location (position and orientation) of the hand in space with respect to the base of the robot, but it does not. • In the kinematic analysis of manipulator position, there are two separate problems to solve: • direct kinemalics, and inverse kinematics • Direct kinematics involves solving the forward transformation equation to find the location of the hand in terms of the angles and displacements between the links
ROBOT KINEMATICS(Cont.) • Inverse kinematics is the more difficult problem to solve and, for some manipulators, closed form solutions cannot be found. However, con-straints are usually placed on manipulator design so that the inverse solution can be found; without this, the robot is difficult to control in Cartesian space. The inverse kinematic solution for a manipulator is usually derived from the direct kinematic transform • Forward Kinematics: to determine where the robot’s hand is?(If all joint variables are known) • Inverse Kinematics: to calculate what each joint variable is?(If we desire that the hand be located at a particular point)
Trajectory planning • Trajectory planning is moving from point A to point B while avoiding collisions over time. • Trajectory planning is a major area in robotics as it gives way to autonomous vehicles. • Trajectory planning is sometimes referred to as motion planning and erroneously as path planning. • Trajectory planning gives a path from a starting configuration S to a goal configuration G avoiding collisions in a 2D or 3D space.The sequence of movements for a controlled movement between motion segment, in straight-line motion or in sequential motions. • It requires the use of both kinematics and dynamics of robots.
Robot vision • Robot vision may be defined as the process of extracting, characterizing, and interpreting information from images of a three dimensional world. • Accurate machine vision opens up new technique computer applications. These application include mobile robot navigation, complex manufacturing tasks ,analysis of satellite images and medical image processing . • A video camera provides a computer with an image represented as 2D grid of intensity levels. Each grid element or pixel may store a single bit of information. The visual image is composed of thousands of pixels. There are fare operations by which we can increase the complexity.
Robotics Vision(cont..) • SIGNAL PROCESSING: - Enhancing the image either for human consumption or as input to another program. • MEASUREMENT ANALYSIS: - For image containing a single object, determining the two-dimension extent of the object depicted. • PATTERN RECOGNITION: - For single object classifying the object into a category drawn from a finite set of possibilities. • IMAGE UNDERSTANDING: - For image containing many objects. Locating the object in the image, classifying them and building a 3D model of the scene.
Sensors in robotics Types of sensors : – Tactile sensors (touch sensors, force sensors, tactile array sensors) – Proximity and range sensors (optical sensors, acoustical sensors, electromagnetic sensors) – Miscellaneous sensors (transducers and sensors which sense variables such temperature, pressure, fluid flow, thermocouples, voice sensors) – Machine vision systems
Sensors in robotics Uses of sensors: – Safety monitoring – Interlocks in work cell control – Part inspection for quality control – Determining positions and related information about objects
Sensors in robotics Desirable features of sensors: Accuracy Operation range Speed of response Calibration Reliability Cost and ease of operation
Physical Configuration Cylindrical Cartesian
Applications of Robotics • Industries − Robots are used for handling material, cutting, welding, color coating, drilling, polishing, etc. • Military − Autonomous robots can reach inaccessible and hazardous zones during war. A robot named Daksh, developed by Defense Research and Development Organization (DRDO), is in function to destroy life-threatening objects safely. • Medicine − The robots are capable of carrying out hundreds of clinical tests simultaneously, rehabilitating permanently disabled people, and performing complex surgeries such as brain tumors. • Exploration − The robot rock climbers used for space exploration, underwater drones used for ocean exploration are to name a few. • Entertainment − Disney’s engineers have created hundreds of robots for movie making.
RoboCup RoboCup is an international research effort to promote autonomous robots. • Robots must cooperate in… • Strategy acquisition • Real-time reasoning • Multi-agent collaboration • Competition against another team of robots
RoboCup • Each robot has… • Pentium 233MHz • Linux OS • Video camera and frame grabber • Sensor System • Kicker
How to the robots make decisions? • Control is based on a set of behaviors • Each behavior has a set of preconditions that either… • Must be satisfied • Are desired • A behavior is selected when all of the “musts” become true • A behavior is selected from several behaviors based on how many desired conditions are true
Applications of AI and Robotics • Industrial Automation • Services for the Disabled • Vision Systems • Planetary Exploration • Mine Site Clearing • Law Enforcement • And Many Others…
More Examples Autonomouse The Ants TJ
The Humanoid COG • MIT’s finest • Broken down COG is just a bunch of sensors and actuators • Except for legs and a flexible spine, COG has all the major degrees of freedom of the human upper body • Sight exists through video cameras • Hearing, touch, hand motion, and speech are being added soon