2010 KOP Control System Workshop
2010 KOP Control System Workshop . January 16, 2010 Hauppauge High School SPBLI – LI FIRST. Mark McLeod Hauppauge Team 358 Northrop Grumman Corp. Mark.McLeod@ngc.com. Agenda. 2010 FIRST Control System Changes Control System Overview Driver Station – Classmate

2010 KOP Control System Workshop
E N D
Presentation Transcript
2010 KOP Control SystemWorkshop January 16, 2010 Hauppauge High School SPBLI – LI FIRST Mark McLeod Hauppauge Team 358 Northrop Grumman Corp. Mark.McLeod@ngc.com
Agenda • 2010 FIRST Control System Changes • Control System Overview • Driver Station – Classmate • Programming Changes: LabVIEW, C++, Java • So, What Else Is New? • Known Issues • Links & Contacts • Open Discussion
Changes • New Driver Station • Any PC-based System • Opens Up Joystick Possibilities • Improved Electrical Components • Analog Bumper • Power Distribution Panel • Jaguar Speed Controllers I/O
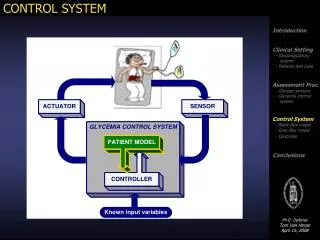
Control System Overview • Driver Station (new) • Classmate, E-stop, IO Breakout, USB Hub, Joystick(s), Optional Switches • Wireless Router (not at competition) • Can use any PC in place of Classmate • Robot (unchanged) • Wireless Bridge, cRIO, cRIO Modules, Module Breakouts (Analog, Solenoid, Digital Sidecar)
Installation Overview Getting Started Document Apply Classmate Updates (LabVIEW, Driver Station, Java, Windriver) Install SW on Optional PC Configure Tools (Team #, etc.) Re-image cRIO (FRC_2010_v19.zip) Configure Optional DS External IO Board
New Parts • Driver Station • Classmate Netbook • 4GB Memory Stick (System Restore-Chapter 1.5.5) • FirstTouch IO Breakout • w/ Breadboard • E-Stop (Robot must be rebooted after use) • USB Hub • (2) Magnetic Encoders w/Magnets • Pink Crossover Cable
What’s Missing? • Veterans Do Not Get • cRIO • Solenoid Breakout • Camera & Mount • Compressor • (1) Battery • Joysticks • DS Router & Robot Wireless Bridge • (3) Speed Controllers • Servos
Classmate SW Details • Windows XP • FRC LabVIEW 8.6 • NetBeans/Java • OpenOffice • IE & Firefox Browsers • AVG Anti-virus (Update Regularly) • PDF Reader
Classmate HW Details • 15GB Disk – Initially 6GB are free • 1GB Memory • (2) USB ports • (1) Ethernet port • (1) SD/MMC Card Reader • Wireless 802.11 b/g (not n) • New Battery life ~ 5hrs • http://ctl.helpserve.com for help with hardware issues
Classmate Getting Started • 1st Startup the OS initializes (takes long time) • Normal Boot & Driver Station Startup takes ~2 minutes • See Chapter 2 (2.5 for DS setup) • Two User Accounts – Driver & Developer • Subsequent Start Defaults to Driver Station Account • Automatic login is bypassed by holding shift while booting • Windows Key + L to switch to Developer account • EXIT on Driver Station Setup screen (after UPDATE) • Install LabVIEW UPDATE First • Install Driver Station UPDATE
Normal Operation • Connectivity • Joystick(s) -> USB Hub -> PC • E-stop -> PC • Optional I/O board • PC to wireless router only at home (via wireless or Ethernet cable) Note: No power on the playing field • Tethered • Classmate connects directly to cRIO port 1 • Must use special Crossover cable (KOP Orange) • Will not operate without E-stop connected • You can bypass the E-Stop button on the diagnostics tab by double clicking on the right E-Stop button LED • Parades • Can Use PC Wireless by Putting Router on Robot
Driver Station Displays • LabVIEW Based • Operation • User Messages • Teleop/Autonomous/Practice Match • Diagnostics • Reboot Robot • Communications & Device Check • Software Error Messages • DS & cRIO Versions • Setup • Team # • Simulated Practice Round • Joystick Order Rearranging • I/O • Simulate FirstTouch I/O
Driver Station Software • Any PC Can Be a Driver Station • Just Install DS Update • Win 2000/XP/Vista • Interchangable with 2009 DS • Update • http://usfirst.org/roboticsprograms/frc/content.aspx?id=10934 • Issue with Missing .dll • Avoid by Installing LabVIEW Update First • Or .dll is Available at the Above Site
Driver Station & Dashboard • Combined on a Single Display • But Separate Applications • Driver Station • Space Bar Disable – F1 Enable • E-stop like the real field-must reboot robot • Dashboard • User Customizable or Completely Replaceable • C:\Program Files\FRC Dashboard\Dashboard.exe • Or Set Path to Optional User Dashboard.exe • My Computer -> Local Disk -> Documents & Settings -> All Users -> Shared Documents -> FRC DS Data Storage.ini • Can Use Separate PC via Setup
Driver Station I/O Board • Be VERY Careful of Static Electricity. Ground Yourself! • General Notes • 500 ma limit • Default: 4 Analog Inputs (3.3v reference), 8 Digital Inputs, 8 Digital Outputs • Advanced: 16 Pins Configurable from Driver Station IO Tab • Quadrature Encoder, PWM devices, Accelerometer, Touch Slider • Breadboard Mount Must Be Used (By Game Rules) • Setup • Control System Manual 2.11 • Uninstall & Install Cypress SW on DS Update (flaw in installation) • All Users/Documents/FRC_IO.v2.hex • Driver Station verification (IO or Setup tabs) • 9v battery is not required – powered by USB cable
IO Pinout (J3) VDDIO +3.3v P0_1 - Analog input 2 P0_3 - Analog input 4 P0_5 - Analog input 6 P0_7 - Analog input 8 P4_5 - Digital input 2 P4_7 - Digital input 4 P6_1 - Digital input 6 P6_3 - Digital input 8 P6_5 - Digital output 2 P6_7 - Digital output 4 P12_3-Digital output 6 P2_7 - Digital output 8 Gnd (J2) VDDIO +3.3v P0_0 - Analog input 1 P0_2 - Analog input 3 P0_4 - Analog input 5 P0_6 - Analog input 7 P4_4 - Digital input 1 P4_6 - Digital input 3 P6_0 - Digital input 5 P6_2 - Digital input 7 P6_4 - Digital output 1 P6_6 - Digital output 3 P12_2-Digital output 5 P2_6 - Digital output 7 Gnd
LabVIEW • Very Similar to Last Year • Robot Project Template • Dashboard Project Template • Errors Displayed to Driver Station • Simplified Device References • Recommend Uninstalling 2009 Version First • 2009 Code Must Be Recompiled • Camera Tracking in Default Project • Update • http://usfirst.org/roboticsprograms/frc/content.aspx?id=10934 • Activation: L13R00000 or Serial# w/FRC DVDs • Can be Installed Without Internet • License Requires Internet • Install Before Driver Station Update
C++ • Windriver IDE • Similar to Last Year • 2009 Code Must Be Recompiled • Guide Document • http://first.wpi.edu/Images/CMS/First/GettingStartedWithC.pdf • Updates • http://first.wpi.edu/FRC/frccupdates.html
Java • NetBeans IDE • For Update Notifications Set the NetBeans Update Site to: • http://first.wpi.edu/FRC/java/netbeans/update/updates.xml • Guide Document • http://first.wpi.edu/Images/CMS/First/Getting_Started_with_Java_for_FRC.pdf • Updates • http://first.wpi.edu/FRC/frcjava.html • BuiltInDefaultCode Project
So, What Else Is New? • Power Distribution Board • LEDs indicate missing or blown breakers • Breaker protection on 5v output (camera) • Analog Breakout • 1600Hz filters for cleaner/better response • Reverse power protection • Burst to 1 amp, steady-state .25 amp (use 2009 Analog bumper for 1 amp steady-state) • 24v Solenoids • Extra Solenoid Slot Available in the cRIO
Jaguar Speed ControllersNew Options • Feedback & Limit Switches • CAN interface • Requires Firmware Update • Black Jaguar – connects to cRIO serial port (serial interface is slower, 1/5, than CAN) • Gray Jaguar is required to string many together • 2CAN device – connects to cRIO Ethernet port 2 • Make Your Own Cables
Odds & Ends • New Robot Status Light Blink • Solid = Autonomous-enabled • Blink (long-on, short-off) = Teleop-enabled • Blink (on,off) = Disabled
Issues • Updates Are Necessary out-of-the-box • Default Camera Tracking is in the Updates • Will Probably Be Other Required Updates Later • Must Re-image cRIO to Update • FRC_2010_v19.zip • Choose Your Language (LabVIEW, C++, Java) • Try Again if Re-imaging Fails • Classmate Failure • (Smithtown) "Windows has recovered from an error” needed to restore the Classmate from the memory stick to correct • System Watchdog msg - ignore • Many of the Installers Have Issues • Missing .dll if LabVIEW Update is Applied After Driver Station Update • Driver Station Update May Need to be Uninstalled and Re-installed to Get the Camera Displaying on the Dashboard
Links • 2010 Control System Manuals & Updates • http://usfirst.org/roboticsprograms/frc/content.aspx?id=10934 Note: Chapter 3 is still Encrypted (Breakaway4FRC!) & Won’t Print • http://decibel.ni.com/content/docs/DOC-8923 • Classmate • http://www.2gopc.com/ • Black Jaguar • http://www.luminarymicro.com/jaguar • http://ordering.digikey.com/Promotions/FirstRoboticsCompetition.aspx • 2CAN Device • http://www.crosstheroadelectronics.com/2CAN.htm • FirstTouch IO Board • http://www.cypress.com/?rID=38235
Contacts • Presentation slides at: Team358.org • Questions/Help please email us. Mark.McLeod@ngc.com