RobOptim: an Optimization Framework for Robotics
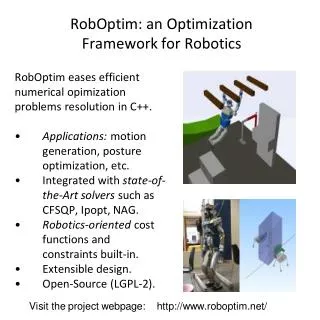
RobOptim is an advanced optimization framework designed specifically for robotics, enabling efficient resolution of complex numerical optimization problems in C++. It supports a variety of applications, including motion generation and posture optimization. The framework integrates seamlessly with state-of-the-art solvers like CFSQP, Ipopt, and NAG, and is equipped with robotics-oriented cost functions and constraints. Its extensible design allows for easy customization. RobOptim is open-source under the LGPL-2 license. For more information, visit the official website: http://www.roboptim.net/.

RobOptim: an Optimization Framework for Robotics
E N D
Presentation Transcript
RobOptim: an Optimization Framework for Robotics • RobOptim eases efficient numerical opimization problems resolution in C++. • Applications: motion generation, posture optimization, etc. • Integrated with state-of-the-Art solvers such as CFSQP, Ipopt, NAG. • Robotics-oriented cost functions and constraints built-in. • Extensible design. • Open-Source (LGPL-2). Visit the project webpage: http://www.roboptim.net/