Problem statement
This project aims to advance the design of an implant-retained finger prosthesis by addressing the shortcomings of the current slip-cover mechanism. Our prototype introduces a novel Allen wrench connection paired with a spring-loaded mechanical joint, enhancing functionality and allowing greater mobility for users. The design focuses on creating a robust substructure that permits easy assembly and cleaning. By improving the connection mechanism, we strive to offer a prosthesis that regains essential finger functionalities, aiming for better patient confidence and usability.

Problem statement
E N D
Presentation Transcript
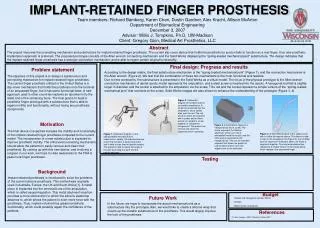
IMPLANT-RETAINED FINGER PROSTHESIS Team members: Richard Bamberg, Karen Chen, Dustin Gardner, Alex Kracht, Allison McArton Department of Biomedical Engineering December 3, 2007 Advisor: Willis J. Tompkins, Ph.D, UW-Madison Client: Gregory Gion, Medical Art Prosthetics, LLC Abstract The project improves the connecting mechanism and substructure for implant-retained finger prosthesis. The current slip-cover device that holds the prosthetic by suction fails to function as a real finger, thus new prosthetic implantation approach is preferred. The proposed prototype consists of the Allen wrench connecting mechanism and the Solid Works displaying the “spring-loaded mechanical joint” substructure. The design indicates that the implant-retained finger prosthesis has a stronger connection mechanism, and is able to regain certain original functionality. Final design: Progress and results Problem statement According to the design matrix, the final substructure mechanism is the “spring-loaded mechanical joint” (Figure 1), and the connection mechanism is the Allen wrench (Figure 2). We feel that the combination of these two mechanisms is the most functional and feasible. Due to time constraints, the substructure is presented in the Solid Works as a virtual model. The focus of the physical prototype is the Allen wrench connection mechanism. A dental acrylic model represents the amputation, and a steel screw is inserted into the acrylic. A hexagonal rod that is slightly larger in diameter and the socket is attached to the amputation via the screw. This rod and the socket represent a simple version of the “spring-loaded mechanical joint” that connects to the screw. Solid Works images are also shown to enhance the understanding of the prototype (Figure 3, 4). The objective of this project is to design a substructure and connecting mechanism for implant-retained finger prosthesis. The current finger prosthetic utilized in the United States is a slip-cover mechanism that holds the prosthesis onto the terminal of an amputated finger, but it has some functional flaws. A new approach used in other countries implants an abutment into the distal end of the remaining bone. The final goal is to build a prosthetic finger prototype with a substructure that is able to regain motility and functionality, without losing any prosthesis components. Figure 2: Schematic diagram of the Allen wrench connection mechanism. A small rod is inserted into the amputation, and a socket slips over the rod. The rod and the socket are attached with a screw, and an Allen wrench is needed to screw together or release the components. The patient can remove and clean the segments when necessary. Motivation Figure 3: A Solid Works figure of a hexagonal rod and a screw. The screw represent the titanium abutment, where one end is embedded inside the acrylic, and the other end is connected to the hexagonal rod. The rod an extended segment that allows the patient to use the Allen wrench to fix the substructure to the abutment. The final device is expected increase the motility and functionality of the implant-retained finger prosthesis compared to the current model. The incorporation of a new substructure is expected to improve prosthetic motility. The enhanced connecting mechanism should allow the patients to easily remove and clean their prosthesis. By coming up with this new device, and involving a surgeon in our work, we hope to raise awareness to the FDA to pass more finger prosthesis. Figure 4: A Solid Works figure of the substructure with a hollow hexagonal sleeve. The sleeve is able to slip on the hexagonal rod (Figure 3), and an Allen wrench attachment method is able to fix these 2 segments together. The long extended portion represents a simple version of the substructure, which replaces the amputated finger. Figure 1: Schematic diagram of the spring-loaded mechanical joint substructure. Ideally, this substructure has a joint that contains a spring that clicks and is able to stay fixed at specific angles. The patient is able to adjust the angle of the joint according the work that the patient performs. Testing Background Implant-retained prosthesis is introduced to solve the problems of the current silicone prosthesis. This method was originally used in Australia, Europe, the UK and South Africa [1]. A metal piece is implanted into the terminal bone of the amputation, which is called osseointegration. This metal abutment insertion provides a more solid anchor to which the silicone elastomer attaches to, which allows the patient to exert more force with the prosthesis. Thus, implant-retained has greater prosthetic functionality, which could possibly regain the confidence of the patients. Budget Future Work • Socket and hexagonal cylinder: $6.00 • Screws • Metal sheets and pieces In the future, we hope to incorporate the actual mechanical joint as a substructure into the prototype. Also, we would like to create a silicone wrap that covers up the metallic substructure of the prosthesis. This would largely improve the look of the prosthesis. References [1] Gion, Gregory. (2007). Meeting, October 2007.