Linearizing ODEs of a PID Controller
Linearizing ODEs of a PID Controller. Anchored by: Rob Chockley and Scott Dombrowski. Basis for Linearization. Ordinary Differential Equation. Taylor Series Expansion. Linear Approximation. Real Life Example. For our example, we created a real world situation. In: 3 mol/s (const)

Linearizing ODEs of a PID Controller
E N D
Presentation Transcript
Linearizing ODEs of a PID Controller Anchored by: Rob Chockley and Scott Dombrowski
Basis for Linearization Ordinary Differential Equation Taylor Series Expansion Linear Approximation
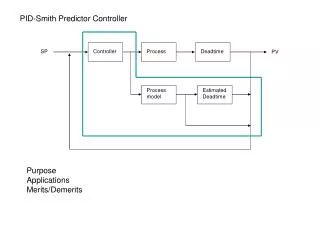
Real Life Example For our example, we created a real world situation. In: 3 mol/s (const) Out: Controlled by PID We are using a PID controller to maintain the tank pressure at a constant pressure of 8 atm.
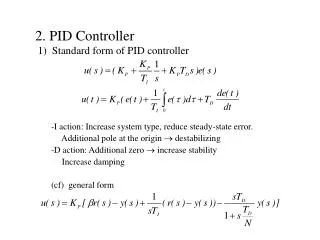
Linearizing Our Model Our system is being controlled by a PID controller. The first equation models the differential pressure change. The second equation is the controller output. The third is the function is the first step of linearization. F(P) is equal to the combined model of the differential pressure change. Finally, the four equation is the derivative of the function f(P). This is used in the linearization model at the steady state pressure of 8 atm.
Model for the System The graph to the right is the model for the system. The pressure within the tank is being controlled by the valve. The valve is being throttled according to the output from the sensor. The pressure fluctuates a great deal at the beginning of the run but eventually reaches steady state at our desired pressure.
Linearization of dP/dt This graph shows the plot of dP/dt vs. P and the linear approximation from a truncated linear expansion. Because the pressure oscillated there are multiple values of dP/dt for one pressure. The linearization is not a good approximation for the behavior of the differential equation.
Linear Approximation behaving Like Nonlinear Function We change the coefficients within the model to create a new behavior. Here, the ratio of change in the output to the change in input is three time what it was previously , and the Integral time is 10 times than before. Here the desired pressure is reached more quickly.
Linearization of dP/dt Again For this trial the model had no oscillation so the nonlinear equations that govern the change in pressure are more easily linearized.
Conclusion This walkthrough and model shows that linearizing nonlinear equations is not always the best idea. The PID controller creates instances where the differential of pressure is not an independent function of one variable. Under certain conditions, however, The model can be use. These models may not occur in real life.