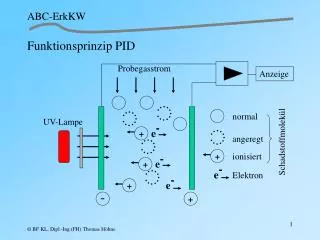
PID Denetleyiciler
PID Denetleyiciler. Yrd.Doç.Dr. Mustafa Doğan. Genel Terimlerin Tanımları. Aşma(Overshoot): Yükselme Süresi(Rise Time): Durulma süresi(Settling Time): Kalıcı Durum Hatası(Steady-State Error):. PID nedir? . P Oransal (P roportional ) I Tümlev (I ntegral )

PID Denetleyiciler
E N D
Presentation Transcript
PID Denetleyiciler Yrd.Doç.Dr. Mustafa Doğan
Genel Terimlerin Tanımları • Aşma(Overshoot): • Yükselme Süresi(Rise Time): • Durulma süresi(Settling Time): • Kalıcı Durum Hatası(Steady-State Error):
PID nedir? P Oransal (Proportional) I Tümlev (Integral) D Türev (Derivative)
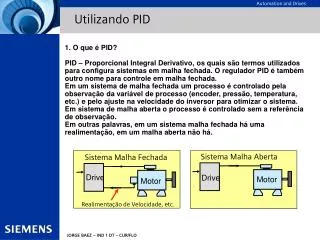
Proportional(Oransal) Mod P: Oransal mod, çıkış sinyalini denetleyicinin girişiyle doğru orantılı olarak ayarlar. sapma
Integral (Tümlev) Modu I: Tümlev modu istenilen değerle (setpoint) işlemin çıkışı arasında oluşan sapmaları (hata) düzeltir.
Derivative (Türev) Modu D: Türevsel modun kullanılmasının asıl amacı , oransal denetimde oluşan aşırı yükselmeleri azaltmaktır. sapma
PID Denetleyici tasarlarken istenilen cevabı elde etmek için izlenicek adımlar • Sistemin açık döngü cevabı elde edilir ve nelerin geliştirilebileceği tanımlanır. • Yükselme zamanını geliştirmek için “Oransal Denetim” eklenir. • Aşmayı geliştirmek için “Türevsel Denetim” eklenir. • Kalıcı durum hatasını yok etmek için “Tümlev Denetimi” eklenir. • İstenilen sistem cevabı elde edilene kadar KP, Ki ve Kd değerleri ayarlanır.
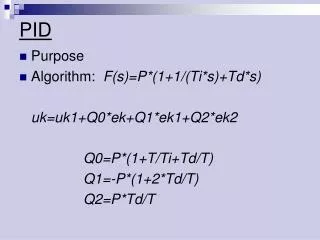
PI ve PD Denetleyiciler PID Denetleyicilerin Genel Denklemi: u(t): Giriş Sinyali e(t): Hata Sinyali e(t)=r(t) – y(t) r(t): Referans Sinyali y(t): Çıkış Sinyali
PI ve PD Denetleyiciler Kp: Oransal Kazanç K =Kp/Ti: Tümlev kazancı Kd =Kp*TD: Türevsel kazanç Kp: Oransal Kazanç Ti: Tümlev zaman sabiti Td: Türev zaman sabiti
PI ve PD Denetleyiciler PI Denetleyici PD Denetleyici
P Denetleyici GPID=KP Açık Döngü Aktarım işlevi: Kp s^3 + 3 s^2 + 3 s + 1
PI Denetleyici Açık Döngü Aktarım İşlevi: KI/s + KP s^3 + 3 s^2 + 3s +1 Kapalı Döngü Cevabı • GPID=KP+KI/s
PD Denetleyici Açık Döngü Aktarım İşlevi: Kp + Kd*s s^3 + 3 s^2 + 3s +1 Kapalı Döngü Cevabı GPID=Kp +Kd *s
Hız Sabitleyici(Cruise Control) b*v (Sürtünme) u m v v u: motorun uyguladığı kuvvet(N) b: sürtünme katsayısı(Nsec/m) m: arabanın kütlesi(kg) v: arabanın hızı dv/dt: ivme Sistemin denklemi;
Sisteme PI Denetleyici Eklendikten Sonra PI DENETLEYİCİ