Download

1 / 14
140 likes | 290 Views
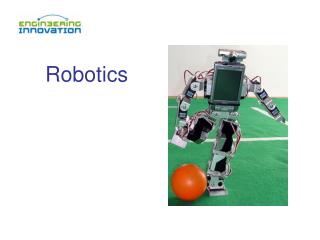
ECE Robotics Journey. Team #3: Rashied Bennett , Tom Bergen, Hugo Caceres , Joseph Chang. “The Group”. Team Members : Rashied , Tom, Hugo , Joe Group Number : # 3. Sensor Characterization.

E N D
ECE Robotics Journey Team #3: Rashied Bennett, Tom Bergen, Hugo Caceres, Joseph Chang
“The Group” • Team Members: Rashied, Tom, Hugo, Joe • Group Number: #3
Sensor Characterization • A sensor is a technological device that measures physical quantities and translates them into precise measurements, in the form of signals, which can be read and analyzed. • The linearity of a sensor is an expression of the extent to which the actual measured curve of a sensor differs from the ideal curve. Linearity shows the constant relationship between a measured physical quantity and the data output that is yielded by the sensor.
Sensor Results • Sonar data and graph shows linearity. • Sonar is reliable because it is linear. • This means the distance is proportional to the sensor reading • Light sensor data and graph also show linearity. • Light reliable like sonar due to proportionality • Rangefinder was not linear
Robot Maze Navigation • Robot must navigate through maze from beginning to end. • Robot can be pre-programmed to go through left, left, right • Bonus Objectives: • Make Robot Self Deciding • Have robot correct itself using light sensors and black lines
Robot Results • Robot made it through the maze • Robot was self deciding • Failed to implement light sensor correction • Light sensor dominated optical rangefinders
Instrumentation Lab • Objective: Use oscilloscope to measure frequency, period, etc… • Make two graphs: • Sinusoidal • Triangle • Difference between AC/DC • Matlab program solving for variables
Elevator Project • Objective: Make elevator able to move two floors • Bonus Objective: Make elevator able to move three floors. • Small elevator for maximum lift
Circuits Lab • Multi-meter measures current of circuit • Learned about resistors in series/parallel • Learned about Diodes • Materials: • Breadboard • Resistors • Diodes
PSpice • Program that allows simulation of circuits • Can make complex circuits • Very useful tool to use • Knowledge good for future academic and professional careers
Matlab HW • Circuit resembles unbalanced Wheatstone bridge • Use Mesh Current Method • Kirchhoff’s Voltage Law : • 300 I1 + 100 I2 + 150 I3 = 0 • 100 I1 + 650 I2 – 300 I3 = 0 • 150 I1 - 300 I2 + 450 I3 = 24
Matlab HW Results I1 = -0.0938 I2 = .0772 I3 = .1361
Conclusion • Team work necessary skill • Hardware and Software are dependent on one another • Prevalence of sensors • Circuit Theory PSpice very good