"Interactive 3D Model Animation: User-Controlled Skeleton and Skin Integration"
Explore our advanced interactive 3D model animation system featuring user-friendly controls for loading skeletons, skins, and animations. The integration process includes a variety of buttons to manage the loading, skinning, weight assignment, and animation of humanoid characters. With scripts managing dynamic transitions and structural changes, users can seamlessly interact with the model. This system emphasizes an intuitive experience by allowing real-time modifications and visual feedback, making it ideal for developers and animators who seek efficiency in 3D model manipulation.

"Interactive 3D Model Animation: User-Controlled Skeleton and Skin Integration"
E N D
Presentation Transcript
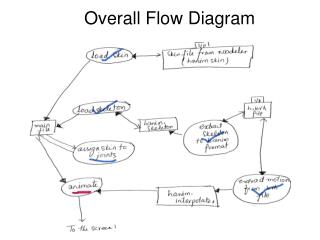
Main.wrl-(Integration done!) DEF buttons Group {} DEF containers Group{} DEF scripts Group{}
Main.wrl-(Integration done!) DEF buttons Group { #Button to load skeleton #Button to load skin #Button to load skin #Button to load animation #Button to animate } ROUTE LoadSkeletonButton.isActive TO loadSkeleton.start ROUTE LoadSkinButton.isActive TO loadSkin.start ROUTE AttachWeightsButton.isActive TO assignWeights.start ROUTE LoadInterpolatorsButton.isActiveTO loadInterpolators.start ROUTE AnimateButton.isActive TO ENGINE.start
Main.wrl-(Integration done!) DEF containers Group { DEF importedSkeleton Group{} DEF importedSkin Group{} DEF importedInterpolators Group{} } ROUTE importedSkeleton.children_changed TO putInHumanoid.start ROUTE importedSkin.children_changed TO putInHumanoid.skinCalled ROUTE importedInterpolators.children_changed TO loadInterpolators.routeTimerToInterpolators
Main.wrl-(Integration done!) DEF scripts Group { #loadSkeleton #loadSkin #putInHumanoid #assignWeights #loadInterpolators #animate } ROUTE LoadSkeletonButton.isActive TO loadSkeleton.start ROUTE LoadSkinButton.isActive TO loadSkin.start ROUTE AttachWeightsButton.isActive TO assignWeights.start ROUTE LoadInterpolatorsButton.isActive TO loadInterpolators.start ROUTE AnimateButton.isActive TO ENGINE.start
Main.wrl-(Integration done!) DEF putSkeletonInHumanoid Script { eventIn MFNode start eventIn MFNode skinCalled directOutput TRUE field SFNode humanoid NULL url "javascript: function start(value) { humanoid=value[1]; print('in first'+humanoid); } function skinCalled(value) { //print(value[0]+','+value[1]); humanoid.humanoidSkin=value[1]; humanoid.skinCoord=value[0]; } " }
Main.wrl-(Integration done!) DEF assignWeights Script { directOutput TRUE field SFFloat threshold 8.5 field SFNode humanoid USE HUMANOID #field SFNode mcSkin USE mocapSkin field MFVec3f coordList [] field SFNode joint NULL field MFNode jointList [] field SFInt32 count 0 url "javascript: function initialize() { coordList = humanoid.skinCoord.point; jointList=humanoid.joints; if(count==0) AssignVertices(); } function AssignVertices() { count++; var iNumJoints = humanoid.joints.length; for (j=0; (j<iNumJoints) ; j++) { var currentJoint = jointList[j]; joint=currentJoint; //Go through all vertices in skin (mocapSkin) for(v=0;v<coordList.length;v++) { var currentVertex=coordList[v]; //calculate distance between current vertes to joint var distance=Math.sqrt((currentJoint.translation[0]-currentVertex[0])*(currentJoint.translation[0]-currentVertex[0])+ (currentJoint.translation[1]-currentVertex[1])*(currentJoint.translation[1]-currentVertex[1])+ (currentJoint.translation[2]-currentVertex[2])*(currentJoint.translation[2]-currentVertex[2])); //if distance within threshold if(distance<threshold) { //add vertex to affectedVertices of the joint joint.affectedVertices[joint.affectedVertices.length]=v; //based on the distance calculate weight of this vertex and add that to weights filed of the joint var weight; //needs a more logical strategy weight=(threshold-distance)/1000*threshold; joint.vertexWeights[joint.vertexWeights.length]=weight; } } } } " }
Main.wrl-(Integration done!) DEF loadInterpolators Script { directOutput TRUE eventIn SFBool start eventIn MFNode routeTimerToInterpolators field MFString address ["boxman-interpolatorGroup.wrl"] field SFNode node USE importedInterpolators field SFString event "addChildren" field SFNode fromNode USE TIMER field SFNode toNode NULL field SFString fromEventOut "fraction_changed" field SFString toEventIn "set_fraction" field SFNode jtoNode NULL field SFString jfromEventOut "value_changed" field SFString jtoEventInt "set_translation" field SFString jtoEventInr "set_rotation" field SFNode humanoidContainer USE importedSkeleton field SFNode humanoid NULL field SFNode engineNode USE ENGINE field SFNode fn NULL field SFString ffe "rotation_changed" field SFString fte "update" url "javascript: function start(clicked) { //Bring in teh interpolators if(clicked) { print('loading interpolators'); Browser.createVrmlFromURL(address, node, event); } }
Main.wrl-(Integration done!) function routeTimerToInterpolators(groupOfInterpolators) { print('animation routing'); humanoid=humanoidContainer.children[1]; var interCount=groupOfInterpolators[0].children.length; //print(interCount); for(i=0;i<interCount;i++) { toEventIn=groupOfInterpolators[0].children[i]; Browser.addRoute(fromNode, fromEventOut, toNode, toEventIn); //routeInterpolatorsToJoints(); if(i==0) { Browser.addRoute(toNode,jfromEventOut,jtoNode,jtoEventInt) jtoNode=humanoid.joints[interCount-2]; } else{ jtoNode=humanoid.joints[interCount-2-(i-1)]; Browser.addRoute(toNode,jfromEventOut,jtoNode,jtoEventInr) } print(i+ toEventIn+jtoNode); } //someone!! fn=humanoid.joints[interCount-i]; print('fn'+fn); Browser.addRoute(fn, ffe, engineNode, fte); } " }