Throw and Push Patterns: Movement and Skill Constraints
Discover the sequential and simultaneous movement patterns in throwing and pushing motions, exploring related skills and constraints such as projectile mass, shape, target area, and person's strength and skill level. Learn about the end segment dynamics and kinetic chain characteristics, as well as lever motions and wheel-axle motions for speed and accuracy.

Throw and Push Patterns: Movement and Skill Constraints
E N D
Presentation Transcript
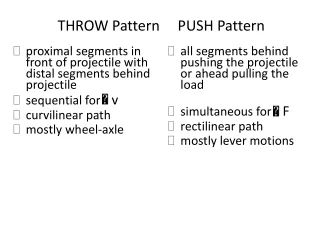
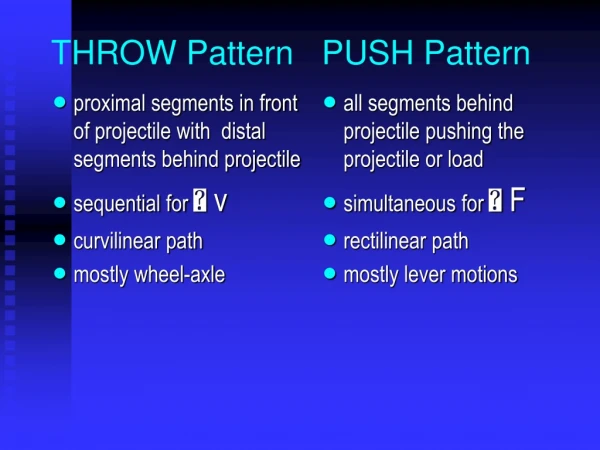
proximal segments in front of projectile with distal segments behind projectile sequential for v curvilinear path mostly wheel-axle all segments behind projectile pushing the projectile or load simultaneous for F rectilinear path mostly lever motions THROW Pattern PUSH Pattern
Constraints: Throw/Push Continuum • Mass of projectile • Volume/Size of projectile • Shape/Profile of projectile • Target Area for projectile • Strength/Power of person • Skill of person
Throw or Kick End Segment Free [e.g. hand, foot] sequential movement of body segments Jump or Push or Pull End Segment Restrained[e.g. foot, hand] simultaneous movement of body segments OPEN Kinetic Chain CLOSED Kinetic Chain
Throwlike Patterns • 1. Proximal Parts Move First • 2. Distal Parts Lag Behind • 3. Achieve either : maximum distance [ HORZ or VERT ] OR maximum velocity
Fig J.1 page 338 1. segment A is accelerated which gives L to entire system: segments A, B, and C 2. A rotates cw while B and C lag behind 3. A is THEN decelerated by muscle T 4. To conserve L, B accelerates cw THEN decelerates, C then accelerates cw
End Point v due to decreasing r • See FIG. J.1 on page 338 L= mk² x • initial k is from axis “a” to top of segment C • when segment A decelerates, the k changes to the distance from axis “b” to top of segment C • when segment B decelerates, the k changes to the distance from axis “c” to top of segment C
v = r • final velocity of hand or foot or implement @ release/impact determines projectile v • r = d from the axis of rotation [e.g. joint] and the contact point of release/impact • see FIG J.12 on page 352 with regard to r
Kinetic Link Characteristics • system of linked segments with a fixed base and a free open end • more massive segments @ proximal end • least massive segments @ distal end • initial motion caused by T applied to base • T gives entiresystem LL= mk² x OR L = I
Sequential Motions • 1. proximal/massive segments move first givingL to entire system • 2. external T decelerates proximal segments • 3. to conserve L, next segment, which is less massive, accelerates with rotation now occurring about a new axis and a smaller k • 4. Each successive segment/link accelerates achieving than previous segment due to both m and k getting progressively smaller
Airborne Reaction Rotation • See FIG 15.16 on page 514 • VB spiker abducts hip and/or flexes knees to I (I = mk²) in lower extremities • turntable demo
Flexion/Extension Protraction/Retraction Abduction/Adduction Medial/Lateral Rotate Pronate/Supinate Inversion/Eversion Lever Motions Wheel-Axle
Wheel-Axle Motions • muscle T rotates a bone which becomes an axle • the wheel is the adjacent segment positioned at an angle to the axle • the wheel r (radius) is modified via flexion/extension or adduction/abduction • see FIG J.6 on page 346 and FIG J.12 on page 352
THROW / PUSH for Speed and Accuracy FIG J.8 page 349 FIG J.10 page 350
Enjoy the Break No Class this Friday