Download
1 / 39
2.35k likes | 12.21k Views
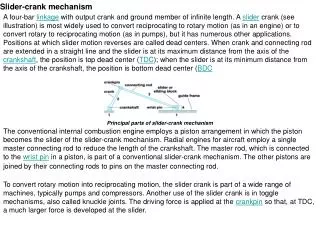
Single Slider Crank Chain In a four bar kinematic chain there are four revolute pairs. If one of this pairs is changed as prismatic/sliding pair that kinematic chain is called single slider crank chain. Link 1 – Fixed Link Link 3 – Connecting Rod

E N D
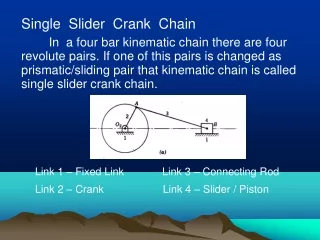
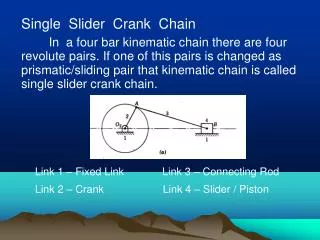
Single Slider Crank Chain In a four bar kinematic chain there are four revolute pairs. If one of this pairs is changed as prismatic/sliding pair that kinematic chain is called single slider crank chain. Link 1 – Fixed Link Link 3 – Connecting Rod Link 2 – Crank Link 4 – Slider / Piston
Inversions of Single Slider Crank Chain As there are four links, fixing each link in turn, four inversions can be obtained. In the first inversion, where the link with one revolute pair and one prismatic pair is fixed. Example: 1) I.C. Engine mechanism, in which the fourth link piston is the input and the crank is output. 2) In air compressor, in which the second link crank is the input and the piston is the output.
2 3 1 4 Link 2 is fixed Second Inversion of Single Slider Crank Chain Second link in the original chain, ie., crank with two revolute pairs is fixed, second inversion is obtained.
Examples for the Second Inversion: 1. Whitworth Quick Return Mechanism 2. Rotary Engine Mechanism
Third Inversion of Single Slider Crank Chain Third link of the original chain, ie., Connecting Rod with two revolute pairs (length of this link is more than crank) is fixed to obtain third inversion. Example: 1. Oscillating Cylinder Mechanism 2. Crank and slotted lever quick return mechanism
Fourth Inversion of Single Slider Crank Chain In the original chain, if the fourth link with revolute pair and prismatic pair is fixed, then the fourth inversion is obtained. Example : Hand Pump
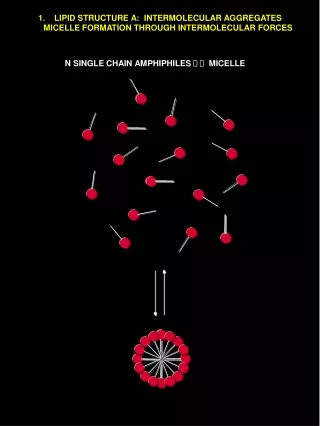
Double Slider Crank Chain This Chain has two revolute pairs and two prismatic pairs. The first inversion is with a link with revolute pair and prismatic pair is fixed. Example: Scotch Yoke Mechanism, which is also called as Sinusoidal Generator.
The Second inversion of the double slider crank chain is obtained when the link with two prismatic pairs is fixed. Example : Elliptic Trammel X = BC cosθ Y = AC sinθ (X / BC) = cosθ (Y / AC) = sinθ (X2 / BC2) = cos2θ (Y2 / AC2) = sin2θ (X2 / BC2) + (Y2 / AC2) = cos2θ + sin2θ ( = 1 Equation for Ellipse.
Third inversion of the double slider crank chain is obtained when the link two revolute pairs is fixed. Example: Oldham coupling, which is used to connect two parallel misaligned shafts.
Straight Line Mechanisms 1.Chebyshev Straight Line Mechanism L1 = 2 Units, L 2 = L 4 = 2.5 Units, L 3 = 1 Unit P is the mid-point of L 3 This is a Double-Rocker Mechanism
2. Hoekens Straight Line Mechanism L 1 = 2 Units, L 2 = 1 Unit, L 3 =L 4 = 2.5 Units Coupler point location from A is 5 units This is a Crank-Rocker Mechanism L 3
3.Roberts Straight Line Mechanism L1 = 2 Units, L2 = L3 = L4 = 1 Unit Coupler Point P is 1 unit each from both pin joint centres of coupler. This is a non-Grashofian Double Rocker. L 3 L1 L1
4. Watt’s Straight Line Mechanism L1 = L3 = 2 Units, L2 = 1 Units Fixed link length is 4 units, and the coupler point P is mid point of the coupler. This is, also, a non-Grashofian Double Rocker mechanism. L1
5.Peaucellier Exact Straight Line Mechanism L1 = L2 , L3 = L4 , L5 = L6 = L7 = L8 Free end point of the Rhombus will trace Exact Straight Line If, L1 ≠ L2 , then the same point will trace a circular arc with very large radius, much larger than the link lengths. L1
Ratchet and Pawl RATCHET is a device that allows rotary or linear motion in only one direction. It can be used to move a toothed wheel one tooth at a time. The part which is used to move the ratchet is known as the PAWL. Motion developed by a ratchet is intermittent motion. They are also used in the freewheel mechanism of bicycle, clocks, screwdrivers, jacks, and hoists. ESCAPEMENTS are generally used in clocks with mechanical motions. In clocks the escapement controls the spring driven clock mechanism such that it moves in regulated steps controlled by a pendulum or an oscillating arm.
Indexing Mechanisms • A simple index mechanism consists • of a hold or a hook that catches a pin on on an index wheel. The Clutch slips • until a solenoid pulls the hold away, • which frees the wheels to turn. • Geneva Mechanisms are often used • in machine tools. They are capable • of indexing or partially rotating some • part of a machine. In cinema projectors Geneva stop is used to move the film on one frame at a time.
Animation of Indexing Mechanisms External Geneva Wheel Internal Geneva Wheel
Double Slider Driven Geneva Mechanism • The pin at the mid point of the green link, which moves in a circular path, drives a Geneva mechanism – used to provide intermittent motion.
Rocking Mechanisms • 1.Crank Rocker Mechanism • 2.Quick Return Mechanism • 3. Cam and Oscillating • Follower Mechanism • n 4. Toothed Rack System (1) (2) • (3) (4)
ACKNOWLEDGMENT To innumerable websites in the internet, and to all those who have uploaded their knowledge, imaginations, ideas, graphic skills etc., on these websites. Also, to all those(including my parents, son, teachers, friends, and relatives), from pre-historic days to to-day, who have registered their knowledge, imaginations, thoughts etc., through different means and mediums.