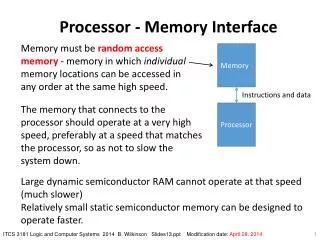
ARM7TDMI Processor
ARM7TDMI Processor. ARM7TDMI processor. The ARM7TDMI processor : 32-bit 범용 microprocessor 중 Advanced RISC machine 계열 중 하나 ARM7TDMI 가 뭐냐? ARM7 - 32-bit Advanced RISC Machine T - Thumb architecture extension

ARM7TDMI Processor
E N D
Presentation Transcript
ARM7TDMI processor • The ARM7TDMI processor : 32-bit 범용 microprocessor중 Advanced RISC machine 계열 중 하나 • ARM7TDMI 가 뭐냐? ARM7 - 32-bit Advanced RISC Machine T - Thumb architecture extension • Two separate instruction sets, 32-bit ARM instructions and 16-bit Thumb instructions D - Debug extension M - Enhanced multiplier I - Embedded ICE macrocell extension • ARM{x}{y}{z}{T}{D}{M}{I}{E}{J}{-S} x:제품군, y:MMU/MPU z:캐시 D:JTAG debug M: 곱셈기 I: embeddedICE Macrocell E: dsp 확장 J: jazelle F: VFP S: synthesizible버전
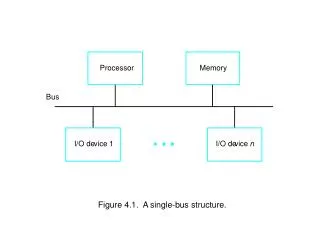
ARM7TDMI Block Diagram • 폰 노이만 아키텍쳐 • 3-단 파이프라인 • fetch, decode, execute • 32-bit 데이터 버스(core) • 32-bit 어드레스 버스(core) • 37 32-bit 레지스터 • 32-bit ARM instruction set • 16-bit THUMB instruction set • 32x8 Multiplier(곱셈기) • Barrel Shifter(배럴 시프트)
ARM7TDMI 동작 모드(1) • ARM7TDMI 프로세서 2가지 동작 상태(모드): • ARM 모드 : executes 32-bit, word aligned ARM instructions • THUMB 모드: execute 16-bit, halfword aligned THUMB instructions • Switching state • THUMB 모드 진입 • BX 명령어에서 operand register 0번 bit의 상태로 구분(set) • Automatically on return from an exception (IRQ, FIQ, ABORT, SWI,…), if the exception was entered with the processor in THUMB state. • ARM 모드 진입 • BX 명령어에서 operand register 0번 bit의 상태(clear) • Automatically on the processor taking an exception. In this case, the PC is placed in the exception mode’s link register.
ARM7TDMI 동작모드(2) • ARM7TDMI 7가지 모드 지원: • User (usr): 일반적인 ARM 프로그램 실행상태 • FIQ (fiq): 고속 인터럽트 처리 • IRQ (irq): 일반 인터럽트 처리 • Supervisor (svc): 운영체제를 위한 보호 모드 • Abort mode (abt): 가상메모리와 메모리 보호 처리 • System (sys): 운영체제를 위한 user 모드 • Undefined (und): 하드웨어 코프로세서의 소프트웨어 에뮬레이션 • 모드 전환은 외부 인터럽트나 익셉션 처리를 위해 사용됨 • 대부분의 어플리케이션은 user mode에서 실행 • 그 밖에는 인터럽트, exception, protect된 리소스의 접근을 위해 system 모드가 사용됨.
ARM7TDMI Registers • ARM7TDMI 총 37개register: • 31 general-purpose 32-bit registers • 6 status registers(CPSR, SPSR_SVC, SPSR_adt, …) • 이 37개 register들은 한번 볼 수는없다.(visible 16개) • The processor state and operating mode dictate which registers are available to the programmer.
Relationship between ARM and THUMB state registers • The THUMB state registers relate to the ARM state registers in the following way:
Program Status Registers (1/3) • ARM7TDMI 한 개의 Current Program Status Register (CPSR), 과 5개의 exception handler를 위해 Saved Program Status Registers (SPSRs) • These register's functions are: • 가장 최근에 실행된 ALU 동작에 대한 정보를 저장 • interrupt enable/disable 제어 • 프로세서의 동작모드 설정
Program Status Registers (2/3) • Condition Code Flags • N : negative/less than flag 연산 결과가 마이너스인 경우 셋 • Z : zero flag 연산결과가 0이 되었을 때 셋 • C : carry/borrow/extend flag 자리올림/내림발생 및 shift 연산에 사용 • V : overflow 발생 시 사용 • In ARM state, all instructions may be executed conditionally. • In THUMB state, only the Branch instruction is capable of conditional execution. • Control Bits • The I, F, T and M[4:0]) bits will be changed when an exception arises. If the processor is operating in a privileged mode, they can also be manipulated by software. • T bit: • 동작모드상태, 셋 되면 thumb모드 동작, 외부 signal에 의해서도 발생 • CPSR에 강제로 이 bit를 바꾸면 예측하지 못하는 상태로 들어갈 수 있다.
Program Status Registers (3/3) • Control Bits • Interrupt disable bits: • I 와 F bitInterrupt disable bit다. Set되었을 때 IRQ/ FIQ interrupt를 disable시킨다. • Mode bits: • The M4, M3, M2, M1 and M0 bits (M[4:0]) are the mode bits. • processor's operating mode를 결정한다. • 잘못된 값을 설정하면, processor 가 reset 되거나 복구 불능상태에 빠진다.
Exceptions (1/5) • Exception program이 halt되었을 때 일반적으로 발생한다. • For example to service an interrupt from a peripheral. • ARM 7 가지의 exception과 각각의 processor mode마다 exception을 가진다. • ARM Exception vectors
Exceptions (2/5) • When handling an exception, the ARM7TDMI: • Link Register에 다음 수행될 명령어의 주소를 저장한다. • SPSR에 현재의 CPSR값을 복사한다. • Exception 에 따른 값을 CPSR로 가져온다. • Exception verctor로부터 fetch된 다음명령어를 PC로 가져온다. • 여러가지 다른 exception들로 부터 방해를 막기위해 인터럽트 disable flag을 set해야 한다. • THUMB 모드에서 exception이 발생하면, pc가 exception vector를 읽어 올때 ARM mode로 자동적으로 바뀌게 된다. • 저장된 Link Register에서 – offset(exception vector) 만큼 뺀값을 pc에 저장. • 저장된 SPSR을 CPSR에 복사 • 인트럽트 disable flag를 clear 한다.(인트럽트가 set되어 있었다면)
Exceptions (3/5) • Reset • When the processor’s Reset input is asserted • CPSR Supervisor + I + F • PC 0x00000000 • Undefined Instruction • If an attempt is made to execute an instruction that is undefined • LR_undef Undefined Instruction Address + #4 • PC 0x00000004, CPSR Undefined + I • Return with : MOVS pc, lr • Prefetch Abort • Instruction fetch memory abort, invalid fetched instruction • LR_abt Aborted Instruction Address + #4, SPSR_abt CPSR • PC 0x0000000C, CPSR Abort + I • Return with : SUBS pc, lr, #4
Exceptions (4/5) • Data Abort • Data access memory abort, invalid data • LR_abt Aborted Instruction + #8, SPSR_abt CPSR • PC 0x00000010, CPSR Abort + I • Return with : SUBS pc, lr, #4 or SUBS pc, lr, #8 • Software Interrupt • Enters Supervisor mode • LR_svc SWI Address + #4, SPSR_svc CPSR • PC 0x00000008, CPSR Supervisor + I • Return with : MOV pc, lr
Exceptions (5/5) • Interrupt Request • Externally generated by asserting the processor’s IRQ input • LR_irq PC - #4, SPSR_irq CPSR • PC 0x00000018, CPSR Interrupt + I • Return with : SUBS pc, lr, #4 • Fast Interrupt Request • Externally generated by asserting the processor’s FIQ input • LR_fiq PC - #4, SPSR_fiq CPSR • PC 0x0000001C, CPSR Fast Interrupt + I + F • Return with : SUBS pc, lr, #4 • Handler @0x1C speeds up the response time
Condition Field (1/2) • All ARM instructions can be conditionally executed, which means that their execution may or may not take place depending on the values of values of the N, C, C and V flags in the CPSR • Every instruction contains a 4-bit condition code field in bits 31 to 28
Condition Field (2/2) • 15개의 condition이 있고, 명령어의 mnemonic에 2개의 접미사가 붙는다. • Assembley에서 Branch 명령의 경우 z-flag가 set되면, BEQ가 된다. • B initReset • 0xEA00000F
Branch Instructions (1/2) • 모든 ARM Processors branch 명령어의 condition을 가질 수 있고, 최대 앞 뒤로 32Mbyte만큼 분기 할 수 있다. (0-24bit: 25개 0x1ffffff) • As the Program Counter (PC) is one of the general-purpose registers (register 15), a branch or jump can also be generated by writing a value to register 15. • subroutine call도 표준 branch중 한 변형이다. Branch후에는 항상 r14(lr)에 명령어의 어드레스를 항상 저장해야 한다. • load 명령어는 4Gbyte어드레스 영역의 어떤 곳이라도 분기할 수 있다. 메모리로 부터 로드 된 32bit 값은 pc에 들어가 branch을 일으킨다. • The ARM7TDMI processor that support the Thumb instruction set also support a branch instruction (BX) that jumps to a given address, and optionally switches executing Thumb instructions.
Branch Instructions (2/2) • List of branch instructions B, BL Branch, and branch with link BX Branch and exchange instruction set (ARM모드에서 Thumb모드로 전환) • Examples B label ; branch unconditionally to label BCC label ; branch to label if carry flag is clear BEQ label ; branch to label if zero flag is set MOV PC, #0 ; R15 = 0, branch to location zero BL func ; subroutine call to function func MOV PC, LR ; R15=R14, return to instruction after the BL MOV LR, PC ; store the address of the instruction after the next one into R14 LDR PC, =func ; load a 32-bit value into the program counter
Data Processing (1/2) • ARM은 16개의 data processing instructions. 대부분의 data processing instruction은 2개의 operand를 가진다. (Move 와and Move 은 하나의operand만 가진다.) • 하나의 register에 하나의 결과값을 저장한다. ( Compare 와 Test명령은 제외-condition code로 업데이트함. 결과를 저장하지 않는다.) • 두개의 operand중 하나는 항상 register고, 나머지는 shitfer operand다.(그밖에 즉치나 register값이다.가 올 수도 있다.) • ALU가 operand2로 사용하기 전에 shifter후에 operand로 사용할 수 있다.
Data Processing (2/2) • List of data processing instructions
곱셈 명령어들 (1/2) • ARM은 2가지 형식의 곱셈명령어가 있다. • normal, 32-bit result • long, 64-bit result • 곱셈명령어는 항상 입력으로 두개의 operand register를 가진다. • For example) MUL R4, R2, R1 ; Set R4 to value of R2 multiplied by R1 MULS R4, R2, R1 ; R4 = R2xR1, set N and Z flags MLA R7, R8, R9, R3 ; R7 = R8xR9 + R3 일반적으로 normal 연산에서 결과값은 항상 하위 값만 가진다.
곱셈 명령어들 (2/2) • 64bit의 결과를 위해서는 4개의 곱셈 명령이 있다. (long 곱셈) • 2개의 값을 곱해서 상위와 하위로 나누어서 각각 저장한다. SMULL R4, R8, R2, R3 ; R4 = bits 0 to 31 of R2xR3 ; R8 = bits 32 to 63 of R2 x R3UMULL R6, R8, R0, R1 ; R6, R8 = R0 x R1UMLAL R5, R8, R0, R1 ; R5, R8 = R0 x R1 + R5, R8
Load / Store 명령어 (1/2) • Load/ store 명령어는 3가지 타입이 있다. • load / store 하나의 register값을 갖는다. • load / store multiple register values • swap a register value with the value of a memory location • load / store 하나의 register값을 갖는다 • LDR/STR, Load/Store word • LDRB/STRB, Load/Store byte • LDRH/STRH, Load/Store unsigned halfword • LDRSB, Load signed byte • LDRSH, Load signed halfword
Load / Store 명령어들 (2/2) • Load and Store multiple registers • List of load and store multiple instructions • LDM, Load multiple • STM, Store multiple • STMDB SP!, {R0,R4,R5,R6,LR} • Swap a register value with the value of a memory location • List of semaphore instructions • SWP, Swap • SWPB, Swap Byte • SWP R12, R10, [R9] ; load R12 from address R9 and ; store R10 to address R9 • SWPB R3, R4, [R8] ; load byte to R3 from address R8 and ;store byte from R4 to address R8
SWI : Software Interrupt • The Software Interrupt instruction enters supervisor mode • ARM에서는 swi를 거의 사용하지 않는다. 대표적으로 사용하는 것은 JTAG 에뮬레이터를 사용하기 위해서 사용된다. • Semihosting library 호출시
Thumb 어떻게 동작할까 ? • Thumb 명령어는 ARM명령어의 파생 계열이다. • Optimizedfor code density. • 대부분의 Thumb instruction은 ARM instruction: • ADD Rd, #Offset8 <> ADDS Rd, Rd, #Offset8 • Inline expansion of Thumb Instruction to ARM Instruction • Real time decompression • Thumb instructions are not actually executed on the core • The core needs to know whether it is reading Thumb instructions or ARM instructions. • Core has two execution states - ARM and Thumb • Core does not have a mixed 16 and 32 bit instruction set.
THUMB: ADD Rd,#Constant 15 0 0 0 1 1 0 Rd Constant Major opcode Always condition Minor opcode Destination & source register Zero extended constant 31 11 8 7 0 28 24 21 20 19 16 15 12 1 1 1 0 0 0 1 0 1 0 0 1 0 Rd 0 Rd 0 0 0 0 Constant I op1+op2 S ARM: ADDS Rd, Rd, #Constant Thumb Instruction Set Decompression
Branch 명령어들 • Thumb supports four types of branch instruction: • unconditional branch =>전후 2Kbytes(2^11) • conditional branch =>전후 256 bytes (2^8) • List of branch instructions • B conditional branch • B unconditional branch • BL Branch with link • BX Branch and exchange instruction set
Data Processing 명령어들 • Thumb data-processing instruction은 ARM data-processing instruction의 축약이다. • 모든 Thumb data-processing instructions set the condition codes • List of data-processing instructions • ADC, Add with Carry • ADD, Add • AND, Logical AND • ASR, Arithmetic shift right • BIC, Bit clear • CMN, Compare negative • CMP, Compare • EOR, Exclusive OR • LSL, Logical shift left • LSR, Logical shift right • MOV, Move • MUL, Multiply • MVN, Move NOT • NEG, Negate • ORR, Logical OR • ROR, Rotate Right • SBC, Subtract with Carry • SUB, Subtract • TST, Test
Load / Store Register 명령어들 • Thumb에서는 8가지의 load / store register 명령어들 • List of load and store register instructions • LDR Load word • LDRB Load unsigned byte • LDRH Load unsigned halfword • LDRSB Load signed byte • LDRSH Load signed halfword • STR Store word • STRB Store byte • STRH Store halfword
Load / Store 곱셈 명령어들 • Thumb에서는 4가지 load / store 곱셈 명령어 • 2개의 block copy (a load and store) • 나머지 2개는 스택명령어인 PUSH / POP 이다. • 스택명령어는 full descending stack동작만 지원한다. stack pointer는 base register로 사용된다. • List of load and store multiple instructions • LDM Load multiple • POP Pop multiple • PUSH Push multiple • STM Store multiple
60% 65% 70% 75% % of ARM code size Code size • Generally, routines in THUMB code are between 65 and 70% the size of the equivalent ARM code.
Arm Instruction Set Advantages • All instructions are 32 bits long. • Most instructions are executed in one single cycle. • Every instructions can be conditionally executed. • A load/store architecture • Data processing instructions act only on registers • Three operand format • Combined ALU and shifter for high speed bit manipulation • Specific memory access instructions with powerful auto-indexing addressing modes • 32 bit ,16 bit and 8 bit data types • Flexible multiple register load and store instructions
Thumb Instruction Set Advantages • All instructions are exactly 16 bits long to improve code density over other 32-bit architectures • The Thumb architecture still uses a 32-bit core, with: • 32-bit address space • 32-bit registers • 32-bit shifter and ALU • 32-bit memory transfer • Gives.... • Long branch range • Powerful arithmetic operations • Large address space