Download
1 / 1
10 likes | 111 Views
Learn about the CHESS Center's mission to innovate graduate research in cyber-physical systems with a focus on fault-tolerant software design. Discover their software tools and projects advancing engineering and computer science curricula.

E N D
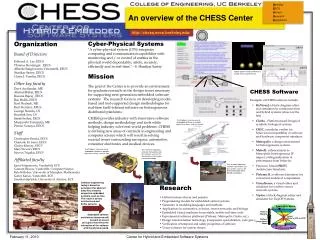
Berkeley • EECS • Annual • Research • Symposium An overview of the CHESS Center Cyber-Physical Systems "A cyber-physical system (CPS) integrates computing and communication capabilities with monitoring and / or control of entities in the physical world dependably, safely, securely, efficiently and in real-time." - S. Shankar Sastry Mission The goal of the Center is to provide an environment for graduate research on the design issues necessary for supporting next-generation embedded software systems. The research focus is on developing model-based and tool-supported design methodologies for real-time fault-tolerant software on heterogeneous distributed platforms. CHESS provides industry with innovative software methods, design methodology and tools while helping industry solve real-world problems. CHESS is defining new areas of curricula in engineering and computer science which will result in solving societal issues surrounding aerospace, automotive, consumer electronics and medical devices. Organization Faculty Edward A. Lee, EECS Alberto Sangiovanni-Vincentelli, EECS Shankar Sastry, EECSClaire J. Tomlin, EECS Karl Hedrick, ME Sanjit Seshia, EECS Masayoshi Tomizuka, ME Staff Christopher Brooks, EECS Charlotte M. Jones, EECS Yulia Golubovskaya, EECS Mary Stewart, EECS Stavros Tripakis, EECS Affiliated faculty Aviral Shrivastava, Arizona State Jonathan Sprinkle, University of Arizona, ECE Hybrid system model of Newton’s Cradle, built using HyVisual. • CHESS Software • Examples of CHESS software include: • HyVisual, a block-diagram editor and simulator for continuous-time and hybrid systems (shown at the left) • Metropolis, a design environment for heterogeneous systems • MetroII, enhancements to Metropolis: heterogeneous IP import, orthogonalization of performance from behavior • Precision Timed (PRET) Architecture Simulator. • Pt1588, an open source implementation of IEEE1588-2008. • PTARM, a precision timed soft core • Ptolemy II, a software laboratory for concurrent models of computation • VisualSense, a visual editor and simulator for wireless sensor network systems. • Viptos, a block-diagram editor and simulator for TinyOS Systems. The Problem: High speed printing presses require millisecond timing over 100 meters The Problem: intensive use of embedded software in complex physical systems, such as cars. The research laboratory: software frameworks and test systems such as the Toyota test cell for engine control technology. The Problem: intensive use of embedded software in complex physical systems, such as aircraft. The research laboratory: PTIDES: Programming Temporally Integrated Distributed Embedded Systems The PTIDES project focuses on model-based design principles for event-triggered real-time distributed systems. The research laboratory: software frameworks and test systems such as the STARMAC Quadrotor Aircraft (Prof. Tomlin) Software engineering today is based on principles that abstract away key semantic properties embedded systems, such as time. The result is ad-hoc architectures and brittle systems. • Research • Design of cyber-physical systems • Hybrid systems theory and practice • Programming models for embedded control systems • Semantics of modeling languages and methods • Applications in automotive, avionics, sensor networks, and biology • Embedded virtual machines for portable, mobile real-time code • Experimental software platforms (Ptolemy, Metropolis, Giotto, etc.) • Design transformation technology (component specialization, code gen.) • Verification of temporal and safety properties of software • Visual syntaxes for system design This work was supported in part by the Center for Hybrid and Embedded Software Systems (CHESS) at UC Berkeley, which receives support from the National Science Foundation (NSF awards #0720882 (CSR-EHS: PRET), #0931843 (CPS: Large: ActionWebs), and #1035672 (CPS: Medium: Ptides)), the Naval Research Laboratory (NRL #NOOI73-12-1-G015), and the following companies: Bosch, National Instruments, and Toyota. The Solution: PTIDES is used to generate code for different microcontrollers. Embedded software architecture tomorrow will be built on sound principles that reflect the interaction of the software with the physical world. Center for Hybrid and Embedded Software Systems