Tracking Week
Tracking Week. We’ve learned how to make a state go to zero (actually, a constant state). Now we are going to learn how to make a state follow a desired time-dependent state. Here’s the new problem. We’ll be looking at this all week

Tracking Week
E N D
Presentation Transcript
Tracking Week We’ve learned how to make a state go to zero (actually, a constant state) Now we are going to learn how to make a state follow a desired time-dependent state
Here’s the new problem We’ll be looking at this all week As you may guess, the nature of the goal is going to be the key But first . . .
Lecture 35: Some review and clarification, and the essence of tracking What does state space mean? What does T do? What are gains? What do we mean by tracking?
review The state vector describes the state of the system. Figuratively speaking, this tells us the position and velocity of every element The state equations then tell us how each element of the state evolves in time We can think of state space as having k “axes” that serve as a basis for the state vector We can look at this for two and three dimensional states. We did this back in Lecture 22, when we looked at the phase plane Let’s look at that again
review The state space equations for the pendulum are I can integrate these numerically and plot the phase plane — for different starting points If the initial energy is below a critical value the pendulum will swing back and forth (the critical value for a scaled pendulum is √2) Let’s see some examples
review We can look at the response of the magnetic suspension in terms of a 3D space.
review The transformation between x and z spaces is simply a rotation of the sets of axes — the bases of the x and z systems The x and z vectors represent the same state viewed from different systems of axes That’s why the eigenvalues do not change We can look at two views of the magnetic suspension response: in x and in z
review In x space we have {y, v, i} In z space we have T.x
review Ax is a vector that points in some “direction” in state space bu is also a vector in state space The state vector changes in the direction indicated by the sum of these two vectors
review review The x space is given to us by the physics and our choice of state vector We can find various z spaces to serve our purposes The diagonal transformation used the eigenvectors as a basis which is why we needed k independent eigenvectors for that to work The companion transformation has basis vectors in its T, which is where the controllability condition comes from (not obvious!) If we want x to be xr we need z to go to zr = Txr Bottom line: The state space is a way of representing the state of a system and we can pick what we like — limited by the physics!
review What are gains? We agree that we are using feedback control We feed back the output in an attempt to control it. The gains are the amount of each element of the state that we feed back. The gains can be assembled in a row vector, which transforms when the coordinates transform which is why we have different gains in z space and x space In the simplest case, u = - gTx
On to tracking The general idea We have a single input system and we want some reference state We can split x into two parts: the reference state and an error and then we can ask that e go to zero, which is what we’ve been doing
The reference state is not totally arbitrary; it cannot be inconsistent with the physics. We apply what we had on the previous slide:
We can ask what we really mean by tracking Do we really need to specify the whole state? Do we care about the whole state? For the magnetic suspension problem, we really only care about y For the overhead crane, we care mostly about y and to a lesser extent, about q So maybe all we need is to have part of the error go away?
In some cases we can find a ur to cancel the dynamics of the reference state We can do this if the problem is in companion form (although we may have some interpretation issues) We can often do it anyway (illustration to follow) But, we have to remember that we are finding the linear dynamics so, just as with basic control, we will have to verify our control in simulation
As an aside, what we have done to date has dealt with steady goals For most of our work We want to move forward to a nonzero
Companion form, tracking z1 = z1r We have z1 and we can find all the others one step at a time and when we get to the end, we can find ur I’ll work with ur this afternoon, and introduce another method tonight We’ll be able to do this for the magnetic suspension problem without even going to companion form
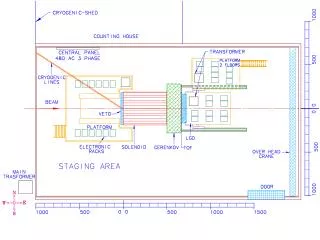
The problem From Kuo BC Automatic Control Systems yis positive down Numerical parameters for later
The coefficient c includes geometry, number of turns of the wire, permeability, etc There are many models of the force vs. gap equation none of them goes like 1/y An inverse square law is not a bad approximation, and I will use that as I did the last time we looked at this problem — we’ll be able to carry some stuff over As it happens, the behavior of the system, and its control, is qualitatively the same the same for any of the inverse models I will choose inverse square, and I will use the numerical coefficients given on the previous slide
We spent a lot of time on this problem before, so I’ll skip a lot of the intermediate steps the nonlinear differential equations in state space form
The equilibrium We require all the time derivatives to be zero From which we can express everything in terms of the equilibrium spacing
Let’s linearize using the “gradient” approach Think of expanding F in a three variable Taylor series around the equilibrium
Remember that So that the expressions become And these are the columns of the linearized matrix And we can get b by differentiating with respect to e
We have converted the original problem into a linear problem The eigenvalues of A are We see that the system is unstable which anyone who’s ever tried to do this will know
Suppose that we want to have the ball oscillate around its equilibrium position I don’t think I can do this using the nonlinear equations of motion We can do this in the linearized formulation. I want y = x1 to oscillate: y = dsin(wt) I don’t actually care about the other elements of the state but I certainly have to make the velocity the derivative of the position the current is not so clear, but it will have to be harmonic I have a linear problem, if some of it is harmonic, then the whole thing must be harmonic
Can I do this in x space, and can I cancel the entire xr piece? Let u = ur + u’
If I can get rid of all the extra terms, then I will have reduced the problem to the usual x —> 0 The third component will be harmonic, but it’s not clear what the phase is
We can use the differential equations to find a3 and b3 and ur
We can solve for b3 and then go on to find the input voltage er = ur
and plug in for xr3 We need to remember that e = xr – x when we get around to simulating the system
We know the problem is controllable (A and b have not changed), but let’s review that, too so it’s controllable
We want to use a gain matrix to stabilize this and then use to put it into the simulation, along with ur
We can look at simulations with the same poles that we used for the simple system We will find that the frequency of the oscillations is critical It works for low frequencies, but not for high Increasing the gain doesn’t seem to make much difference
Here’s where I’d like to stop and go to Mathematica to review and extend the magnetic suspension case The notebook goes like: Derive the general (nonlinear) equations of motion Build a simulation Linearize and design a linear control for equilibrium Test the control in simulation Choose a desired state and design a tracking control Combine the tracking and equilibrium controls and test in simulation