Download
1 / 7
80 likes | 729 Views

E N D
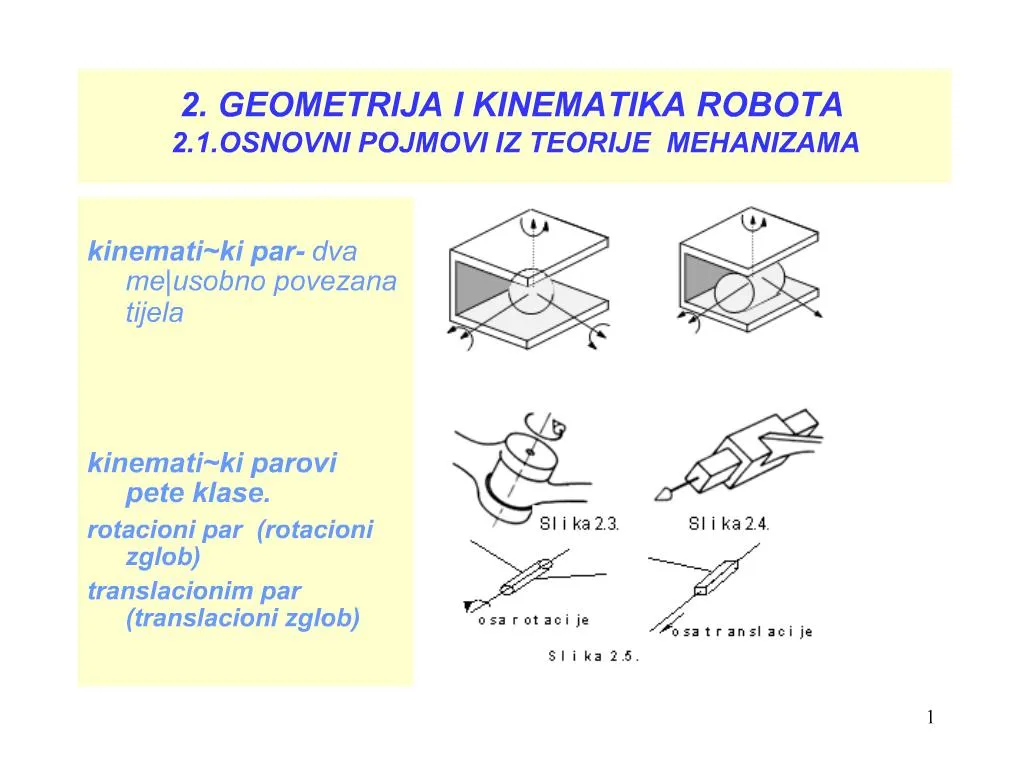
1. 1 2. GEOMETRIJA I KINEMATIKA ROBOTA 2.1.OSNOVNI POJMOVI IZ TEORIJE MEHANIZAMA kinemati~ki par- dva me|usobno povezana tijela kinemati~ki parovi pete klase. rotacioni par (rotacioni zglob) translacionim par (translacioni zglob)