Download
1 / 17
170 likes | 418 Views
Tutorial 1, UGB 230N. Controller, Sensors and Motors. Ding Ke 2009-10-12. How to control your robot?. For Vex, we have two ways, Remote Control Programming Logic. Controller. The Vex Controller. The Vex Controller Board The Vex Controller is the brain of the

E N D
Tutorial 1, UGB 230N Controller, Sensors and Motors Ding Ke 2009-10-12
How to control your robot? • For Vex, we have two ways, • Remote Control • Programming Logic
The Vex Controller The Vex Controller Board The Vex Controller is the brain of the Robot. All of your inputs and outputs go through this controller.
Remote Control Signal Reception The vex RF Receiver Module allow the robot to receive transmitted signals. Reception begins when a radio signal reaches the receiver’s antenna.
Remote Control • The Vex Micro Controller coordinates the flow of information and power on the robot. All other electronic system components must be connected to the Micro Controller in order to function. • Control Configurations
Programming Logic • Easy C • Easy C is a programming language that you will use to tell your robot what to do. • In Easy C, programs are written using icon-based code, but the interface includes a window that displays the program in a text-based format as well.
Sensors • Why does a robot need sensors? • The controller need additional information in order to make right decisions • The sensors are used to get these information. • There are different kinds of sensors, for example, touch sensors, light sensors, line follower sensors, optical shaft encoder, ultrasonic sensors
Sensors defined • Sensors convert physical phenomena into readable electric signals. • Also known as “transducers.”
Vex Sensors • Bumper switch sensor • Limit switch sensor
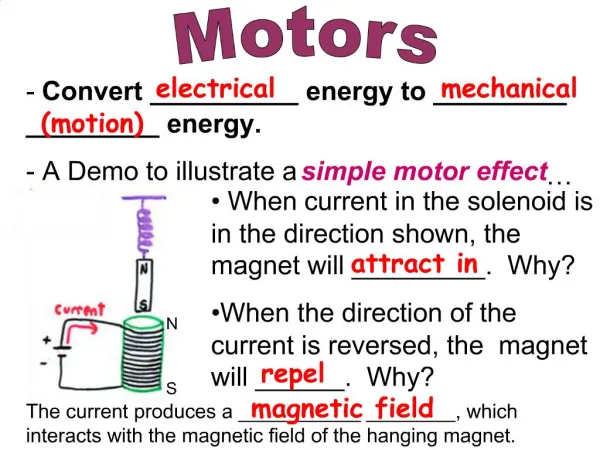
Motors • Motors get their power from the batteries. • motors convert electrical energy into mechanical energy • Connected to the controller.
Vex Motors • Motor spinning either forward or backward at a controlled speed. • Servo Motor Can be directed to turn to face a specific direction, rather than just spin forward or backward.