Download

1 / 19
190 likes | 227 Views
Explore how organizations leverage ICT in car manufacturing, including the use of robotic arms, stepper motors, and end effectors. Discover the hardware and software requirements, applications, and benefits of these technologies in automating various tasks in the production process.

E N D
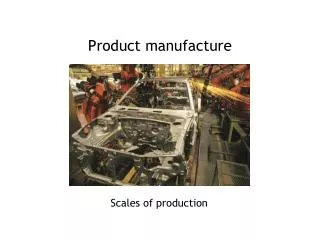
How organizations use ICT Car Manufacture
Objectives • Have an understanding of how organizations use ICT. • Be able to describe a number of uses, giving the hardware and software requirements. • Be able to describe the applications that these uses can be put to.
Car manufacture • Robotic arms are used extensively in car manufacture • Robotic arms generally have 7 sections with 6 joints • Each joint is controlled by an actuator (a stepper motor)
Stepper Motors • Normal DC motors spin either forwards or backwards when current is applied • A stepper motor moves in very small steps instead • It makes a precise number of stepped revolutions to move the robotic armin very small increments to the correct position.
What do robot arms do? Paint car bodies Put on wheels Drill holes in car bodies Fix rivets Tighten bolts Assemble electrical circuits Insert engines
How do they do it? The computer controls the movement of the arm so that a variety of jobs can be carried out. The jobs carried out depend on the end effector attached to the arm.
Types of end effector Gripper • To pick up parts & put them somewhere else • Grippers usually have pressure sensors built in to them • These sensors tell the robot how hard it is gripping something so that the robot doesn’t drop or break it
Camera • To inspect work • Quality control purposes
Welding gun • To weld parts of the car body together • Welding can be hazardous to humans
Vacuum cups • To pick up parts without obstructing the sides or bottom • Small complex car parts • Windscreens/ flat sheets of metal etc
Drills • To make holes in the car body
Screwdrivers • Also spanners and riveters • To place and tighten screws, nuts, bolts and rivets
Spray guns • To paint the car body • Paint fumes are dangerous to humans
Sanders/polishers • To produce a shiny finish after painting
End effectors • A robot arm can have any of the previous end effectors • If the end effector is changed, the programming must also be changed
Why use robots? • Designed to perform the same task/ operation over and over again • For a person, this would be repetitive & boring
Why use robots? Greater accuracy than a human Lower running costs compared with paying a human Do not get tired Work is consistent standard Continuous process, no need for breaks or shift changes
How is a robot programmed? A programmer guides the arm through each step Either by remote control Or by physically holding the arm with sensors attached Computer stores exact sequence of movements in its memory