Euler Rotation
Euler Rotation. Angular Momentum. The angular momentum J is defined in terms of the inertia tensor and angular velocity. All rotations included The angular momentum need not be collinear with the angular velocity. Not along principal axis Not at center of mass . p. J. r.

Euler Rotation
E N D
Presentation Transcript
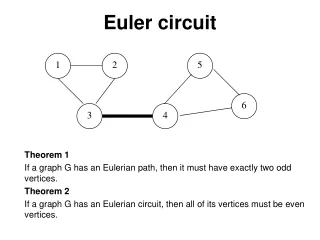
Angular Momentum • The angular momentum J is defined in terms of the inertia tensor and angular velocity. • All rotations included • The angular momentum need not be collinear with the angular velocity. • Not along principal axis • Not at center of mass p J r
Torque N causes a change in angular momentum. Rotational second law Use the body frame for a constant inertia tensor. Motion in accelerated frame Torque
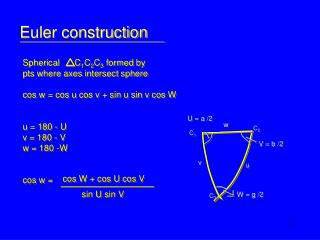
Select the body coordinates to match the principal axes. Three moments of inertia Simplified angular momentum terms Redo the torque equations. These are Euler’s equations of motion. Euler Equations
Dumbbell • The principal axes are along and perpendicular to the rod. • Measure change in angular momentum. J l
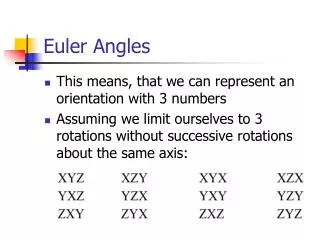
A rotation matrix can be described with three free parameters. Select three separate rotations about body axes Rotation of f about e3 axis. Rotation of q about e1 axis. Rotation of y about e3 axis. These are the Euler angles. Euler Angles e3 q e2 e1 f y
Any vector z can be rotated though the Euler angles. The equivalent matrix operation is the product of three separate operations. Euler Matrices
Full Rotation • Any rotation may be expressed with the three angles. next