Download

1 / 16
160 likes | 347 Views
Computation of Voronoi diagram of planar freeform closed convex curves using touching discs . Bharath Ram Sundar and Ramanathan Muthuganapathy Department of Engineering Design Indian Institute of Technology Madras, Chennai, India. Voronoi diagram of curves.

E N D
Computation of Voronoi diagram of planar freeform closed convex curves using touching discs Bharath Ram Sundarand Ramanathan Muthuganapathy Department of Engineering Design Indian Institute of Technology Madras, Chennai, India
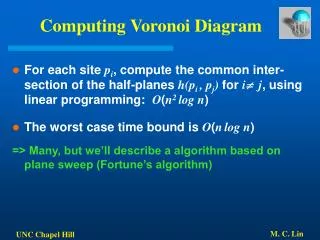
Voronoi diagram of curves Definition :Given a number of disjoint planar regions bounded by free-form curve segments C0(t), C1(r1), ... , Cn(rn), their Voronoidiagram [Aurenhammer 1991] is defined as a set of points that are equidistant but minimal from two different regions.
Why a branch point is difficult to compute? • The bisector between pair of curves contributes to the Voronoi diagram. • Typically constructed from the lower envelope of all pairs of bisectors. • Some portions of the curves my not be required. Current Approach: Use bisector or portions of them to compute branch points. Here, it is shown that branch points can be identified without explicitly solving the bisector.
Our methodology • Voronoi neighborhood between two curves is created/changed at minimum distance point/branch point. • Hence these special points are solved for directly. Minimum distance as antipodal or two touch disc. Branch disc (BD) as three touch disc (TTD)
Initially all pairs of minimum antipodal discs (MADs) are solved and store in a list. • MADs are processed in increasing order of radius in the list. • Whenever discs are added connectivity information is maintained. • Three touch discs (TTDs) is solved for only when relevant neighborhood is formed and inserted into the list . All consistent antipodal lines Minimum radius antipodal
Illustration of the basic idea Initial Radius list After processing Rab, Rbc TTD of (Ca, Cb, Cc) added TTD is processed to decide if it is a branch disc
Algorithm continued 3 2 4 5 1
Salient features • Given a curve of degree m, the degree of the bisector is 4m − 2. Computing TTD or AD has a degree of m+(m−1). • Instead of step sizes or intersection of bisectors, a simple directed edge existence is used.
Conclusion • It has been shown that bisector computation is not required to compute the branch points, effectively reducing computational complexity to a large extent. • Algorithm avoids explicit intersection checks with each curve for checking the emptiness of antipodal discs and branch discs. • Relevant portions that contribute to the Voronoi are identified and local bisectors are computed only for corresponding pairs. • Curves on the convex hull are obtained as a by product of the algorithm. • Extension of the algorithm to non-convex curves is currently underway.
Backup slides • Definition 1: A disc of radius R is essentially a circle of radius R. • Definition 2: When a disc is tangential to a curve, the point on the curve that just touches the disc is called footpoint. • Definition 3: Radius vector (RV) is the vector having the tail as the center of the disc and head as its footpoint. • Definition 4: A disc is said to be consistent if outward normal of the curve is opposite to the RV at every footpoint. • Definition 5: An antipodal disc (AD) is a disc where the normals at the two footpoints are opposite to each other. Minimum antipodal disc (MAD) is the minimum in radius of all ADs and its corresponding footpoints are termed minimum antipodal points (MAPs). Line joining the two footpoints of the MAD is called minimum antipodal line (MAL).
Definition 6: A three touch disc (TTD) is a disc having three footpoints, each one touching a different curve. • Definition 7: A Voronoi disc is a disc at any point on the VD. It is always empty. • Definition 8: A branch disc (BD) is an empty disc whose center is a branch point. It has three footpoints. • Definition 9: A Voronoi segment is a contiguous set of points having two footpoints bound on either side by a branch point and a center of MAD or from a branch point and ∞.
Lemma 1: Only a consistent AD or TTD plays a role in the Voronoi diagram. • Lemma 2: MAD is always a consistent disc. • Lemma 3: Bisector radius function attains local minima only at MAPs between the two curves. • Lemma 4: Voronoiradius function attains localminimaonly at MAPs. • Lemma 5: Voronoi disc will touch a convex curve at most at one point. i.e. the disc will have footpoints from different curves. • Lemma 6: Radius of cTTD of any given three curves is not less than the radius of MAD of any pair of curves among the three.