Download
1 / 94
950 likes | 1.14k Views
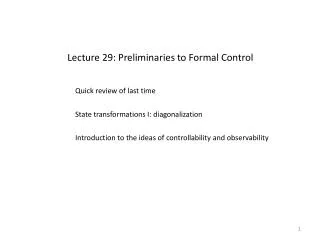
Lecture 29: Preliminaries to Formal Control. Quick review of last time. State transformations I: diagonalization. Introduction to the ideas of controllability and observability. What did we do last time?. We looked at outputs and found transfer functions.

E N D
Lecture 29: Preliminaries to Formal Control Quick review of last time State transformations I: diagonalization Introduction to the ideas of controllability and observability
What did we do last time? We looked at outputs and found transfer functions The we took the transfer function and used It to find a new equivalent system The examples we did gave a simpler equivalent system typically an A matrix in companion form Let me review some of the results from last time: suspension and pendulum
Gillespie Us z2 m2 k3 c3 z1 m1 k1 zG
Put these numbers into our picture z2 m2 = 2.479 lb-sec2/in m2 k3 c3 k3 = 143 lb/in c3 = 15.06 lb-sec/in z1 m1 = 0.194 lb-sec2/in m1 k1 = 1198 lb/in k1 zG
Simplified block diagram red denotes the upper pair x3 x1 u = zG x4 x2 blue denotes the lower pair
I can form the transfer function between the ground motion and the axle motion The numerator is not constant, so we will want to use the method we discussed last time
This defines a state, but it is not the state we started with! The left hand equation defines the dynamics in terms of a new state
We can make a block diagram of the system and we can add the output y 37515 356217 + u - 83.7 6970 37515 356217
Let me add a couple of comments We can make a new dynamical system from the block diagram I have not addressed the connection between the old state and the new state I’ll deal with that systematically another day For now, let’s look at the dynamics of the two systems
Let’s compare the A matrices for the two systems The original matrix The new matrix They have the same eigenvalues
The inverted pendulum on a cart m q l u M y
Now I want to put in the motor that drives the force force on the cart the motor torque wheel radius
This will modify the matrix A and make the input u the voltage e so that we have a modified A and b
The block diagram -1 u = e l
Last time we looked at the angle as the output Today I’d like to look at the cart position as my output This leads me to
From which we get a new state block diagram — much simpler than the old one + u - 1/25000 12005 -249900 -117649
The block diagram -1 u = e l
We can build A from the block diagram + u - 1/25000 12005 -249900 -117649
The story so far . . . We have discovered that we can solve the problem In terms of a transfer matrix or in the common case of a SISO system, a scalar transfer function
We only looked at the single input-single output (SISO) case For which the transfer matrix is a scalar, the transfer function If the numerator of H is not constant, we had to split the transfer function This defined a new state z, and we didn’t know how to connect z and x
Today I want to look at transformations in general, and at two very special transformations: diagonalization and companion form I’m going to start with diagonalization, which is a close relative of modal analysis We’ll eventually settle on companion form, which is what we’ve been getting informally from our transfer function games we’ll get a formal approach to that on Thursday What would we like to do? The eigenvectors are the state space equivalent of the modal vectors of modal analysis Can we make the A matrix diagonal — uncoupling the eigenvectors? The answer is yes, sometimes . . .
We need to transform the state x to a new state z that will separate the eigenvectors A linear transformation between two vectors can be written T is a constant matrix, and we want transformations such that it has an inverse general transformation The equation becomes and we can simplify
We would be happy if TAT-1 were diagonal If A has distinct eigenvectors we can make that happen we candiagonalizeA. Let V be a matrix whose columns are the eigenvectors of A then
Thus if we choose Tto be V-1 we can diagonalizeA In that case we’ll have or, in terms of the individual equations Uncoupled first order ordinary differential equations, which we know how to solve Block diagrams on the next slide
u l1 u l2 etc
What is x in terms of z? So if I want the full state, I can find z and then use T-1 (here V) to obtain the physical state in term of z
We still have to think about the output u l1 u y l2
All the left hand multipliers have to be nonzero for the input to reach all the zs All the right hand multipliers have to be nonzero for all the zs to contribute to the output
What does all this have to say about the examples we’ve worked? Two masses and some springs The auto suspension Artificial example 5A The inverted pendulum on a motor-driven cart
From Lecture 13 f1 f2 k1 k3 k2 m1 m2 y1 y2
Let the input be f1 f1 k1 k3 k2 m1 m2 y1 y2
Let the input be f1 f1 k1 k3 k2 m1 m2 y2 Let the output be y2
Put in numbers and generally simplify a bit: k1 = 1 = k2, k3 = k, m1 = 1 = m2 I can do this without loss of generality by appropriate scaling we have one variable parameter — the strength of the coupling spring
The matrix of eigenvectors, V = T-1 is given by It is important to note that I can multiply the eigenvectors by a constant without changing anything. If you don’t like complex displacements, multiply by j
The two coupling matrices are given by Both are complete, so the input affects all the components of z and the output contains all the components of z We can draw the block diagram
u u u u y l1 l2 l4 l3
What is the interpretation of z? The first two lines involve y1 and y2 moving together (sum of x1 and x2) the second two lines involve them moving in the opposite directions The coefficients reflect the eigenvalues: ±J and ±j√(1+2k)
Gillespie Us z2 m2 k3 c3 z1 m1 k1 zG
The differential equations, supposing z positive up Define a physically reasonable state