Download
1 / 27
270 likes | 464 Views
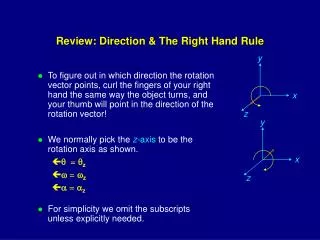
y. x. z. y. x. z. Review: Direction & The Right Hand Rule. To figure out in which direction the rotation vector points, curl the fingers of your right hand the same way the object turns, and your thumb will point in the direction of the rotation vector!

E N D
y x z y x z Review: Direction & The Right Hand Rule • To figure out in which direction the rotation vector points, curl the fingers of your right hand the same way the object turns, and your thumb will point in the direction of the rotation vector! • We normally pick the z-axis to be the rotation axis as shown. • = z • = z • = z • For simplicity we omit the subscripts unless explicitly needed.
Review: Torque and Angular Acceleration NET=I • This is the rotational analogue of FNET = ma • Torque is the rotational analogue of force: • The amount of “twist” provided by a force. • Moment of inertiaIis the rotational analogue of mass • If I is big, more torque is required to achieve a given angular acceleration.
F2 F1 Act 1Rotations • Two wheels can rotate freely about fixed axles through their centers. The wheels have the same mass, but one has twice the radius of the other. • Forces F1 and F2 are applied as shown. What is F2 / F1 if the angular acceleration of the wheels is the same? (a) 1 (b) 2 (c) 4
and but so Since R2 = 2R1 F2 F1 Act 1Solution We know
Review: Work & Energy • The work done by a torque acting through a displacement is given by: • The power provided by a constant torque is therefore given by:
Falling weight & pulley • A mass m is hung by a string that is wrapped around a pulley of radius R attached to a heavy flywheel. The moment of inertia of the pulley + flywheel is I. The string does not slip on the pulley. • Starting at rest, how long does it take for the mass to fall a distance L. I R T m mg a L
Falling weight & pulley... • For the hanging mass use F = ma • mg - T = ma • For the pulley + flywheel use =I • = TR = I • Realize that a = R • Now solve for a using the above equations. I R T m mg a L
Falling weight & pulley... Flywheel w/ weight • Using 1-D kinematics (Lecture 1) we can solve for the time required for the weight to fall a distance L: I R T m where mg a L
Rotation around a moving axis. • A string is wound around a puck (disk) of mass M and radius R. The puck is initially lying at rest on a frictionless horizontal surface. The string is pulled with a force F and does not slip as it unwinds. • What length of string L has unwound after the puck has moved a distance D? M R F Top view
The distance moved by the CM is thus • So the angular displacement is Rotation around a moving axis... • The CM moves according to F= MA • The disk will rotate about its CM according to =I M A R F
Rotation around a moving axis... • So we know both the distance moved by the CM and the angle of rotation about the CM as a function of time: (a) (b) The length of string pulled out is L = R: Divide (b) by (a): F F D L
M A R F Comments on CM acceleration: • We just used =I for rotation about an axis through the CM even though the CM was accelerating! • The CM is not an inertial reference frame! Is this OK??(After all, we can only use F = ma in an inertial reference frame). • YES! We can always write =Ifor an axis through the CM. • This is true even if the CM is accelerating. • We will prove this when we discuss angular momentum!
Rolling • An object with mass M, radius R, and moment of inertia I rolls without slipping down a plane inclined at an angle with respect to horizontal. What is its acceleration? • Consider CM motion and rotation about the CM separately when solving this problem (like we did with the lastproblem)... I M R
y x Rolling... • Static friction f causes rolling. It is an unknown, so we must solve for it. • First consider the free body diagram of the object and use FNET = MACM : In the x direction Mg sin- f = MA • Now consider rotation about the CMand use =I realizing that = Rf andA = R M f R Mg
Rolling... • We have two equations: • We can combine these to eliminate f: I A M R For a sphere:
Act 2Rotations • Two uniform cylinders are machined out of solid aluminum. One has twice the radius of the other. • If both are placed at the top of the same ramp and released, which is moving faster at the bottom? (a) bigger one (b) smaller one (c) same
- DU = DK Energy conservation: but and Act 2Solution • Consider one of them. Say it has radius R, mass M and falls a height H. H
Act 2Solution So: So, (c) does not depend on size, as long as the shape is the same!! H
Sliding to Rolling Roll bowling ball • A bowling ball of mass M and radius R is thrown with initial velocity v0. It is initially not rotating. After sliding with kinetic friction along the lane for a distance D it finally rolls without slipping and has a new velocity vf. The coefficient of kinetic friction between the ball and the lane is . • What is the final velocity, vf, of the ball? vf= R v0 f = Mg D
(b) Sliding to Rolling... • While sliding, the force of friction will accelerate the ball in the -x direction: F = -Mg = Ma so a = -g • The speed of the ball is therefore v = v0 - gt (a) • Friction also provides a torque about the CM of the ball.Using =I and remembering that I = 2/5MR2for a solid sphere about an axis through its CM: v f= R x v0 f = Mg D
Sliding to Rolling... (a) (b) • We have two equations: • Using (b) we can solve for t as a function of • Plugging this into (a) and using vf = R (the condition for rolling without slipping): Doesn’t depend on , M, g!! x vf= R v0 f = Mg D
(a)(b)(c) Act 3Rotations • A bowling ball (uniform solid sphere) rolls along the floor without slipping. • What is the ratio of its rotational kinetic energy to its translational kinetic energy? Recall that for a solid sphere about an axis through its CM:
K = Act 3Solution • The total kinetic energy is partly due to rotation and partly due to translation (CM motion). rotational K translational K
K = Since it rolls without slipping: Act 3Solution rotational K Translational K
Atwoods Machine with Massive Pulley: y • A pair of masses are hung over a massive disk-shaped pulley as shown. • Find the acceleration of the blocks. x M • For the hanging masses use F = ma • -m1g + T1 = -m1a • -m2g + T2 = m2a R T2 T1 a • For the pulley use =I • T1R - T2R m2 m1 a m2g (Since for a disk) m1g
Large and small pulleys Atwoods Machine with Massive Pulley... y • We have three equations and three unknowns (T1, T2, a). Solve for a. -m1g + T1 = -m1a (1) -m2g + T2 = m2a (2) T1 - T2 (3) x M R T2 T1 a m2 m2 m1 m1 a m2g m1g
Recap of today’s lecture • Review • Many body dynamics • Weight and massive pulley • Rolling and sliding examples • Rotation around a moving axis: Puck on ice • Rolling down an incline • Bowling ball: sliding to rolling • Atwood’s Machine with a massive pulley • Look at textbook problems