Download
1 / 25
260 likes | 312 Views
This research aims to optimize airfoil geometry parameters using advanced computational methods such as Particle Swarm Optimization and Direct Numerical Optimization. The study focuses on designing Multi-Mission UAVs with morphing airfoils for enhanced aerodynamic performance and efficiency. Various geometric representation techniques and optimization algorithms are explored to achieve optimal airfoil shapes. The project addresses critical issues in UAV development and aims to provide cost-effective solutions with greater mission effectiveness.

E N D
Airfoil Geometry Parameterization through Shape Optimizer and Computational Fluid Dynamics Manas Khurana The Sir Lawrence Wackett Aerospace Centre RMIT University Melbourne - Australia 46th AIAA Aerospace Sciences Meeting and Exhibit 7th – 10th January, 2008 Grand Sierra Resort – Reno, Nevada
I-view: www.defense-update.com www.airliners.net Presentation Outline • Introduction • Role of UAVs • Research Motivation & Goals • Design of MM-UAV • Current Design Status • Direct Numerical Optimization • Airfoil Geometry Shape Parameterisation • Test Methodology & Results • Flow Solver • Selection, Validation & Results Analysis • Optimization • Airfoil Analysis • Summary / Conclusion • Questions
X-45: www.Boeing.com Pegasus: www.NorthropGrumman.com RMIT University: Preliminary RC-MM-UAV Design Concept Introduction • Multi-Mission UAVs • Cost Effective; • Designed for Single Missions; • Critical Issues and Challenges; • Demand to Address a Broader Customer Base; • Multi Mission UAV is a Promising Solution; and • Provide Greater Mission Effectiveness • Research Motivation & Goals • Project Goal - Design of a Multi-Mission UAV; and • Research Goal – Intelligent Airfoil Optimisation • Design Mission Segment Based Airfoil • Morphing Airfoils
Aerodynamic Optimisation • Design Methodology • Direct Numerical Optimisation • Geometrical Parameterization Model; and • Validation of Flow Solver • Coupling of the two Methods • Swarm Intelligence Optimization • Neural Networks • DNO Computationally Demanding; • Development of an ANN within DNO; and • Integrate Optimisation Algorithm within the ANN Architecture
Geometric Representation Technique Features • Key Requirements • Flexibility and Accuracy; • Cover Wide Design Window with Few Variables; • Generate Smooth & Realistic Shapes; • Provide Independent Geometry Control; • Application of Constraints for Shape Optimization; and • Computationally Efficient • Approaches • Discrete Approach; • Shape Transformations: Conformal Mapping; • Polynomial Representations; and • Shape Functions added to Base-Line Profile
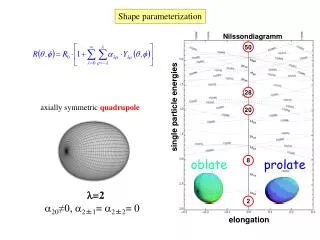
Airfoil Shape Transformations • Conformal Mapping Approach • Computationally In-Expensive; • Joukowski & Kármán-Trefftz Transformations; • Transformation from Complex to -Plane; and • Five Shape Parameters • xc - Thickness • yc - Camber towards leading edge • xt - Thickness towards trailing edge • yt - Camber towards trailing edge • n - Trailing edge angle • Conformal Mapping Restrictions • Limited Design Window; • Divergent Trailing Edge Airfoils not possible; and • Failure to Capture Optimal Solution
Analytic Function NACA 0015 Population & Shape Functions Optimization Airfoil Shape Functions • Introduction • Analytical Approach; • Control over Design Variables; • Cover Large Design Window; • Linearly Added to a Baseline Shape; • Participating Coefficient act as Design Variables (i); and • Optimization Study to Evaluate Parameters
Shape Function Convergence Criteria • Convergence Measure Requirements • Flexibility & Accuracy; and • Library of Target Airfoils • Geometrical Convergence Process • Specify Base & Target Airfoil; • Select Shape Function; • Model Upper & Lower Surfaces; • Design Variable Population Size (2:10); • Perturbation of Design Variables; • Record Fitness - Geometrical Difference of Target and Approximated Section; • Aggregate of Total Fitness; and • Geometrical Fitness vs. Aerodynamic Performance
Algorithm • Initialise Particle Swarm • Initialise Particle Velocities • Evaluate Fitness of Each Particle • Update according to: • Velocity Update • Position Update • Repeat until Convergence Satisfied Intelligent Search Agent – Particle Swarm Optimization • Swarm Approach • Models Natural Flocks and Movement of Swarms; • Quick, Efficient and Simple Implementation; • Ideal for Non-Convex Discontinuous Problems; • Solution Governed by Position of Particle within N-dimensional Space; • Each Particle Records Personal Fitness – pbest; • Best Global Fitness – gbest; • Velocity & Position Updates based on Global Search Pattern; and • Convergence – Particles Unite at Common Location J. Kennedy and R. Eberhart, "Particle Swarm Optimization“, presented at IEEE International Conference on Neural Networks, 1995.
Particle Swarm Optimizer Search Agents Particle Swarm Optimization Set Up • PSO Structure / Inputs Definition • Velocity Update: • Position Update: Standard vs. Adaptive PSO Scaling Factors Cognitive & Social (c1 & c2) Determine ‘pull’ of pbest & gbest • c1 – Personal Experience • c2 – Swarm Experience SPSO • c1 = 2 • c2 = 2 A-PSO • c1 = 2 • c2 = 2 • ‘w’ Facilitates Global Search • ‘w’ Facilitates Local Search Inertia Weight (w): where Maximum Velocity • 0.1-10% of NDIM • 0.1-10% of NDIM • 0.1-10% of NDIM
Low Velocity = Low Fitness Velocity Fitness Fitness Particle Swarm Optimizer - Function Test • Definition: • Search Domain: • Initialization Range: • Global Minima (Fitness):
Low Velocity = Low Fitness Velocity Fitness Fitness Particle Swarm Optimizer - Function Test • Definition: • Search Domain: • Initialization Range: • Global Minima (Fitness):
Summary of Results Measure of Geometrical Difference Hicks-Henne Most Favorable Legendre Polynomials Computationally Not Viable Aerodynamic Coefficients Convergence Shape Parameterization Results • Geometrical Convergence Plots / Animations • s Hicks-Henne Geometrical Convergence • s Bernstein Geometrical Convergence • Aerodynamic Convergence Plots / Animations • s Hicks-Henne Aerodynamic Convergence • s Bernstein Aerodynamic Convergence
Polynomial Function Limitation Local Shape Information; No Direct Geometry Relationship; NURBS Require Many Control Points; and Lead to Undulating Curves PARSEC Airfoils Fitness Magnitude of Shape Functions Shape Functions Limitations • PARSEC Airfoil Representation • 6th Order Polynomial; • Eleven Variables • Equations Developed as a Function of Airfoil Geometry; and • Direct Geometry Relationship H. Sobieczky, “Parametric Airfoil and Wings“, in: Notes on Numerical Fluid Mechanics, Vol. 68, pp. 71-88, 1998
Convergence to Target Lift Curve Slope Convergence to Target Drag Polar Convergence to Target Moment Convergence to Target L/D PARSEC Aerodynamic Convergence
YUP t/c Camber Nose Radius Low YUP = Good CD Performance Lift Coefficient Drag Coefficient Moment Coefficient Lift-to-Drag Ratio PARSEC Design Variables Definition Effect of YUP on PARSEC Airfoil Geometry Effect of YUP on PARSEC Airfoil Aerodynamics
Ideal Surface Bumpy Surface Shape Function Modifications • Airfoil Surface Bumps • Aerodynamic Performance Improvements; • Rough Airfoils Outperform Smooth Sections at Low Re; • Control Flow Separation; • Passive & Active Methods for Bypass Transition; • Reduction in Turbulence Intensity; and • Bumps Delay Separation Point • Shape Functions - Further Developments • Local Curvature Control; • Roughness in Line with Boundary Layer Height; and • Control over Non-Linear Flow Features Airfoil Surface Bumps to Assist Flow Reattachment Source: A. Santhanakrishnan and J. Jacob, “Effect of Regular Surface Perturbations on Flow Over an Airfoil”, - University of Kentucky,AIAA-2005-5145
Laminar Turbulent Flow Solver – Computational Fluid Dynamics
Flow Solver Validation – Case 1: NASA LS(1)0417 Mod • Validation Data • CP Agreement at AOA 10; • Lift & Drag Convergence over Linear AOA; • Lift 2% ; Drag 5%; • Solution Divergence at Stall; and • Fluid Separation Zone Effectively Captures Boundary Layer Transition
Flow Solver Validation – Case 2: NACA 0012 • Validation Data • CP Agreement at AOA 11; • Lift & Drag Convergence over Linear AOA; • Lift 5% ; Drag 7%; • Solution Divergence at Stall; and • Fluid Separation Zone Effectively Captures Boundary Layer Transition
Objective Function = 2 CL = 0.40 Minimize CD Optimizer Inputs Final Solution Swarm Size = 20 Particles rLE = [0.001 , 0.04] 0.0368 YTE = [-0.02 , 0.02] 0.0127 Teg = [-2.0 , -25] -19.5 TEW = [3.0 , 40.0] 29.10 XUP = [0.30 , 0.60] 0.4581 YUP = [0.07 , 0.12] 0.0926 YXXU = [-1.0 , 0.2] -0.2791 XL = [0.20 , 0.60] 0.5120 YL = [-0.12 , -0.07] -0.1083 YXXL = [0.2 , 1.20] 0.6949 Results t/c = 20% CL = 0.4057 CD = 0.0069 Total Iterations = 29 Final Airfoil Shape Optimization History Plot Sample Optimization Run
Coefficient of Lift NN Structure Coefficient of Drag NN Structure Coefficient of Moment NN Structure Aerodynamic Coefficient Database – Artificial Neural Networks • Artificial Neural Networks – Airfoil Training Database • Geometrical Inputs; • Aerodynamic Coefficient/s Output/s; • Set-up of Transfer Function within the Hidden Layer; and • Output RMS Evaluation R. Greenman and K. Roth “Minimizing Computational Data Requirements for Multi-Element Airfoils Using Neural Networks“, in: Journal of Aircraft, Vol. 36, No. 5, pp. 777-784 September-October 1999
www.cosmosmagazine.com www.mathworks.com Conclusion • Geometry Parameterisation Method • Six Shape Functions Tested; • Particle Swarm Optimizer Validated / Utilized; • SOMs for Design Variable Definition; and • PARSEC Method for Shape Representation • Flow Solver • RANS Solver with Structured C-Grid; • Transition Points Integrated; • Acceptable Solution Agreement; and • Transition Modeling and DES for High-Lift Flows • Airfoil Optimization • Direct PSO Computationally Demanding; and • ANN to Reduce Computational Data
Acknowledgements • Viscovery Software GmbH [http://www.viscovery.net/] Mr. Bernhard Kuchinka Kindly provided a trial copy of Viscovery SOMine