Mission Extension Using Sensitive Trajectories and Autonomous Control
40 likes | 144 Views
This project aims to enable spacecraft to maximize data collection and linger around planets cost-effectively using new sensitive/chaotic trajectories. By applying weak stability boundary theory, it achieves dynamic sensitivity to save fuel and accomplish missions with minimal DeltaV. The operational demonstrations include salvaging missions for Hiten and SMART-1, showcasing the application of chaos theory in space travel. Key applications involve motion about planets and newly discovered quasi-stationary motion, focusing on utilizing the Moon for WSB region transfers and weak captures. The goal is to reduce DeltaV requirements, enhance control frequency, and optimize autonomous control algorithms for spacecraft.

Mission Extension Using Sensitive Trajectories and Autonomous Control
E N D
Presentation Transcript
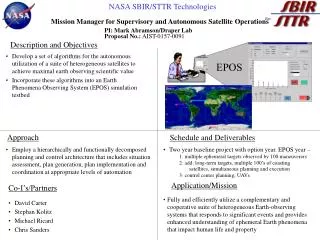
Mission Extension Using Sensitive Trajectories and Autonomous Control Edward Belbruno Princeton University and Innovative Orbital Design, Inc. AISRP PI MEETING 2005 April 3-6, NASA Ames
Goal- Enable spacecraft to linger about a planet for extended time spans in a cost effective manner, and autonomously • Data collection is maximized for a given mission • Accomplish goal by using new sensitive/chaotic trajectories • Dynamic sensitivity saves fuel -> do more with less • Theory is weak stability boundary (WSB) theory developed by EB, 87-90 • Idea: Transition region about a planet, eg Moon, between capture and escape –>chaotic weak capture • Can achieve ballistic lunar capture transfers(~surfercatchingwave)
Operational Demonstrations • Used in 1991 to salvage Japan’s Hiten and bring to Moon -> First application of chaos to space travel -> New 90 day ballistic capture transfer • Used in 2004 to get ESA’s SMART-1 captured into lunar orbit • Ideas played a key role in 1998 salvage of Hughes HGS-1 using Moon
Approach • Two key applications: a. Motion about planet in WSB region b. Newly discovered Quasi-stationary motion • Focus on a. using Moon • WSB transfer to Moon -> ballistic capture in WSB region • Can maintain weak capture for tiny DeltaV • Demonstrated in February’s work, DeltaV is very small ~ 20 m/s for 3-4 months • Smaller the DeltaV, more unstable/complicated the motion Idea- Reduce DeltaV, require more frequent control • Optimize -> will yield control algorithm that’s autonomous