Download
1 / 19
190 likes | 354 Views
GPS BASED AUTONOMOUS GROUND VEHICLE WITH ANDROID PHONE INTERFACE AND REAL TIME DISPLAY By: Kaushal B. Panchal B.E Electronics. Autonomous. What Is Auotonomity ?

E N D
GPS BASED AUTONOMOUS GROUND VEHICLE WITH ANDROID PHONE INTERFACE AND REAL TIME DISPLAY By: Kaushal B. Panchal B.E Electronics
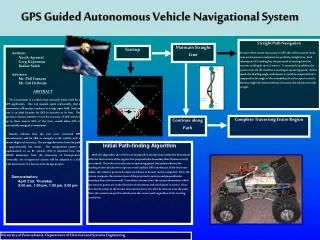
Autonomous What Is Auotonomity ? • Its an Integration of many technologies such as path planning, positioning, and orientation sensing along with vehicle control and obstacle avoidance.
GPS and its involvement Utilisation Of GPS • To Find the Real time Coordinates i.e Time, position and fix type data. • Course and speed information relative to the ground. Problems faced with data • NMEA 0183 Standard • Decoding NMEA 0183 Standard
Interfacing GPS to AVR Micro–controller The important part of interfacing was done with the help of UART. The GPS was of TTL logic so it was easily complyable The Problems faced were • Right Baud rate • To get the first data as your Real time co-ordinate data • Extraction of data from NMEA 0183 Protocol
NMEA 0183 Protocol $GPGGA,035238.000,2307.1219,N,12016.4423,E,1,9,0.89,23.6,M,17.8,M,,*69
Obstacle Avoidance The Important Topics • Manoeuvrability • Avoiding Larger Obstacle
The Role of SENSORS • Ultrasonic Sensors • Image processing • Interfacing to the Micro-controller
Navigation Algorithm Using Vincenty's formula: Vincenty’s formula a, b = major & minor semiaxes of the ellipsoid Notes: f = flattening (a−b)/a φ1, φ2 = geodetic latitude L = difference in longitude U1 = atan((1−f).tanφ1) (U is ‘reduced latitude’) U2 = atan((1−f).tanφ2) Let λ = L (first approximation) iterate until change in λ is negligible (e.g. 10-12 ≈ 0.06mm) { sinσ=√[ (cosU2.sinλ)2 + (cosU1.sinU2 − sinU1.co sU2.cosλ)2 ] (14) cosσ (15) = sinU1.sinU2 + σ = atan2(sinσ, cosσ) cosU1.cosU2.cosλ (16) sinα = cosU1.cosU2.sinλ / sinσ (17) cos2α = 1 − sin2α cos2σm= cosσ − 2.sinU1.sinU2/cos2α (18) C = f/16.cos2α.[4+f.(4−3.cos2α)(10) λ′=L+ (1−C).f.sinα.{σ+C.sinσ. [cos2σm+C.cosσ. (−1+2.cos22σm)]} (11) u2 = cos2α.(a2−b2)/b2 3 A= 1+u2/16384.{4096+u2.[−768+u2.(320−175.u2)]} B= u2/1024.{256+u2.[−128+u2.(74−47.u2)]} 4 Δσ= B.sinσ.{cos2σm+B/4.[cosσ.(−1+2.cos22σm) − B/6.cos2σm. (−3+4.sin2σ).(−3+4.cos22σm)]} 6 s = b.A.(σ−Δσ) α1 = (20) atan2(cosU2.sinλ, (19) cosU1.sinU2 α2=atan2(cosU1.sinλ−sinU1.cosU2+ (21) − sinU1.cosU2.cosλ) cosU1.sinU2.cosλ) s is the distance (in the same units as a & b) α1 is the initial bearing, or forward azimuth α2 is the final bearing (in direction p1→p2) Explanation of the concept and Havershine concept.
Obstacle Avoidance Algorithm Position Of Sensors
My Prototype: Top view with H – Bridge Circuits Front view Avr (AtMega128) With GPS
Problems Incurred using a 8 Bit MCU and use of ANDROID • Large GPS data Resulted in overflow • Looking for an alternative with a High Bit processing Solutions resulted • Use of High Bit MCU of AVR • Handing over the process to an Android Phone
Idea of giving all the Processing to an ANDROID Phone With the data of GPS having large processing MCU i.e 16 to 32 bit MCU I thought of handing over the data to the Phone as it already has high Bit rate processing MCU With the help of GOOGLE found some informative sites http://developer.android.com/sdk/android-4.0.html http://news.softpedia.com/news/How-to-Run-Android-Applications-on-Ubuntu-115152.shtml http://www.vogella.de/articles/Android/article.html Now the Phone Eradicates the AVR micro-controller Acts in its place as a Arithmetic Processor and Robot controller.
The Important Questions that remain are: • The Interface between the Phone And Robot • The Interface between Phone and the HOST
Interfacing the robot and the phone: This time we will use AVR X-Mega series micro-controllers. Using this, we get all the features of the normal 8 bit micro-controller but the unique part is it has an inbuilt USB host. This is used as an way of serial communication between the Phone and Robot. As it is USB communication a standard way of applying it, so it has standard port to use, which makes it cost effective and no other circuit has to be designed. As we get the information from the Phone we can actually then control the Motors and accordingly manoeuvre the complete Robot . The latter part of bearing calculations and mathematical part is done by the phone, this thus simplifies the Process and the phone can also be used with other Robots as well.
Interface of Phone and Host and Real time Tracking: Once the Destination coordinates are provided the robot will begin its path toward the destination. Then if the controller or anyone else wants to see the current progress or even abort the robots action then with the use of the Android SDK we create an application. This application is designed such that the whole information can be relayed to the HOST or the controller via a fast INTERNET. With the advent of 3G services readily available in India one can sit around in any corner of the world and control the Robot. With simple HTTP (Hyper text transfer Protocol) one can send and receive information to a specific IP(Internet Protocol)Address. As the GPS information is relayed back to the host, using a simple widget using JAVA can be created and this can be routed to INTERNET and the specific Maps of those location can be downloaded and we can view the exact location and progress of the Robot.
Thank you and You Will Never Walk Alone kaushalp12@gmail.com