Download
1 / 32
320 likes | 596 Views
Rigid Body Motion and Image Formation . Coordinates of the vector :. 3-D Euclidean Space - Vectors. A “free” vector is defined by a pair of points :. P’. Y’. g. P. y. x. X’. 3D Rotation of Points – Euler angles.

E N D
Rigid Body Motion and Image Formation CS223b, Jana Kosecka
Coordinates of the vector : 3-D Euclidean Space - Vectors A “free” vector is defined by a pair of points : CS223b, Jana Kosecka
P’ Y’ g P y x X’ 3D Rotation of Points – Euler angles Rotation around the coordinate axes, counter-clockwise: z CS223b, Jana Kosecka
Rotation Matrices in 3D • 3 by 3 matrices • 9 parameters – only three degrees of freedom • Representations – either three Euler angles • or axis and angle representation • Properties of rotation matrices (constraints between the elements) CS223b, Jana Kosecka
Rotation Matrices in 3D • 3 by 3 matrices • 9 parameters – only three degrees of freedom • Representations – either three Euler angles • or axis and angle representation • Properties of rotation matrices (constraints between the elements) Columns are orthonormal CS223b, Jana Kosecka
Canonical Coordinates for Rotation Property of R Taking derivative Skew symmetric matrix property By algebra By solution to ODE CS223b, Jana Kosecka
3D Rotation (axis & angle) Solution to the ODE with or CS223b, Jana Kosecka
Rotation Matrices Given How to compute angle and axis CS223b, Jana Kosecka
P’ t Y’ x x’ P z’ y z 3D Translation of Points Translate by a vector CS223b, Jana Kosecka
Homogeneous coordinates: Rigid Body Motion – Homogeneous Coordinates 3-D coordinates are related by: Homogeneous coordinates are related by: CS223b, Jana Kosecka
Homogeneous coordinates: Rigid Body Motion – Homogeneous Coordinates 3-D coordinates are related by: Homogeneous coordinates are related by: CS223b, Jana Kosecka
Properties of Rigid Body Motions Rigid body motion composition Rigid body motion inverse Rigid body motion acting on vectors Vectors are only affected by rotation – 4th homogeneous coordinate is zero CS223b, Jana Kosecka
Rigid Body Transformation Coordinates are related by: Camera pose is specified by: CS223b, Jana Kosecka
Rigid Body Motion - continuous case • Camera is moving • Notion of a twist • Relationship between velocities CS223b, Jana Kosecka
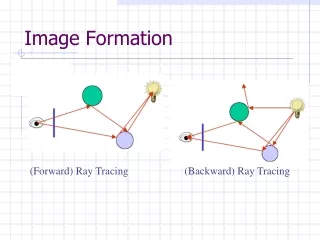
Image Formation • If the object is our lens the refracted light causes the images • How to integrate the information from all the rays being reflected from the single point on the surface ? • Depending in their angle of incidence, some are more refracted then others – refracted rays all meet at the point – basic principles of lenses • Also light from different surface points may hit the same lens point but they are refracted differently - Kepler’s retinal theory CS223b, Jana Kosecka
Thin lens equation • Idea – all the rays entering the lens parallel to the optical axis on one side, intersect on the other side at the point. Optical axis f f CS223b, Jana Kosecka
Lens equation p O z’ f f Z’ Z z • distance behind the lens at which points becomes in • focus depends on the distance of the point from the lens • in real camera lenses, there is a range of points which • are brought into focus at the same distance • depth of field of the lens , as Z gets large – z’ approaches f • human eye – power of accommodation – changing f CS223b, Jana Kosecka
Image Formation – Perspective Projection “The School of Athens,” Raphael, 1518 CS223b, Jana Kosecka
Pinhole Camera Model Pinhole Frontal pinhole CS223b, Jana Kosecka
More on homogeneous coordinates In homogenous coordinates – these represent the Same point in 3D The first coordinates can be obtained from the second by division by W What if W is zero ? Special point – point at infinity – more later In homogeneous coordinates – there is a difference between point and vector CS223b, Jana Kosecka
Pinhole Camera Model • Image coordinates are nonlinear function of world coordinates • Relationship between coordinates in the camera frame and sensor plane 2-D coordinates Homogeneous coordinates CS223b, Jana Kosecka
metric coordinates Linear transformation pixel coordinates Image Coordinates • Relationship between coordinates in the sensor plane and image CS223b, Jana Kosecka
Calibration matrix (intrinsic parameters) Projection matrix Camera model Calibration Matrix and Camera Model • Relationship between coordinates in the camera frame and image Pinhole camera Pixel coordinates CS223b, Jana Kosecka
Calibration Matrix and Camera Model • Relationship between coordinates in the world frame and image Pinhole camera Pixel coordinates More compactly Transformation between camera coordinate Systems and world coordinate system CS223b, Jana Kosecka
Radial Distortion Nonlinear transformation along the radial direction New coordinates Distortion correction: make lines straight Coordinates of distorted points CS223b, Jana Kosecka
Image of a point Homogeneous coordinates of a 3-D point Homogeneous coordinates of its 2-D image Projection of a 3-D point to an image plane CS223b, Jana Kosecka
Image of a line – homogeneous representation Homogeneous representation of a 3-D line Homogeneous representation of its 2-D image Projection of a 3-D line to an image plane CS223b, Jana Kosecka
Image of a line – 2D representations Representation of a 3-D line Projection of a line - line in the image plane Special cases – parallel to the image plane, perpendicular When -> infinity - vanishing points In art – 1-point perspective, 2-point perspective, 3-point perspective CS223b, Jana Kosecka
Visual Illusions, Wrong Perspective CS223b, Jana Kosecka
Vanishing points Different sets of parallel lines in a plane intersect at vanishing points, vanishing points form a horizon line CS223b, Jana Kosecka
Ames Room Illusions CS223b, Jana Kosecka
More Illusions Which of the two monsters is bigger ? CS223b, Jana Kosecka