Download
1 / 6
60 likes | 160 Views
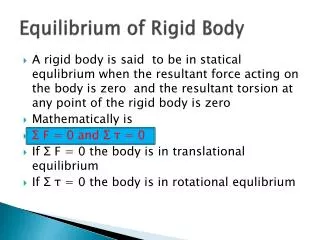
Understand the static equilibrium of a system with multiple forces using trigonometric calculations. Calculate unknown forces and angles based on known parameters such as weight, dimensions, and angles. Solve for pivot forces and angles to ensure balanced equilibrium in a simple and concise manner.

E N D
Rigid Body Equilibrium By Leo Takahashi, PSU Beaver Campus
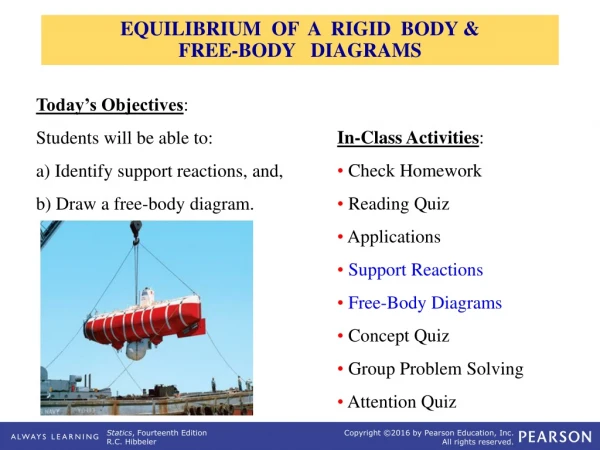
PB = L ; PA = D ; PC = S Weight of Sign = W B Weight of Pole = mg A steel cable Thin chain Pole’s Center of gravity C P Frictionless Pivot
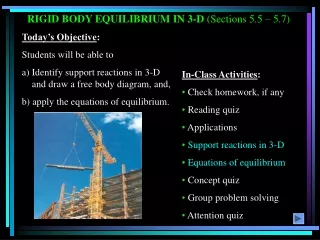
PB = L ;PA= D ; PC = S B Weight of Sign = W Weight of Pole = mg A +x B C P FT A W +y C fx fy mg P
PB = L ; PA = D ; PC = S +x B Fx = 0 Fy = 0 FT A W +y C P = 0 fx fy mg C = 0 A = 0 B = 0 P
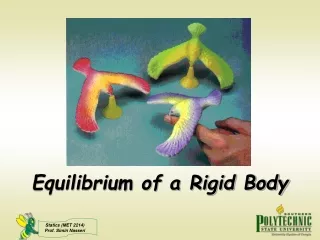
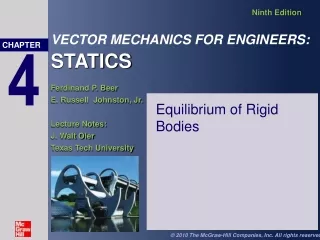
+x L FT W D +y S fx fy mg Fx = 0 P fx – mgCos - FTCos - WCos = 0 Fy = 0 fy – mgSin + FTSin - WSin = 0 P = 0 -(mgS)Sin + FTDSin - WLSin = 0
If m, g, W, S, D, L, , and are known, this set of equations can be solved for the three unknowns, fx , fy, and FT. Fx = 0 fx – mgCos - FTCos - WCos = 0 The magnitude of the pivot force can be calculated from its components, and the angle the pivot force makes with the pole (+x axis) is P= Tan-1(fy/fx). Fy = 0 fy – mgSin + FTSin - WSin = 0 P = 0 -(mgS)Sin + FTDSin - WLSin = 0