Download
1 / 1
10 likes | 147 Views
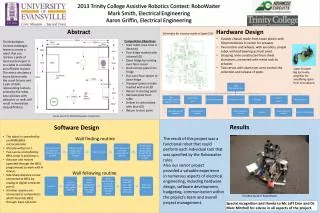
2013 Trinity College Assistive Robotics Contest: RoboWaiter Mark Smith, Electrical Engineering Aaron Griffin, Electrical Engineering. Abstract. Hardware Design. Schematic for circuitry made in Eagle CAD. Custom chassis made from Lexan plastic with 3D printed base in center for actuator

E N D
2013 Trinity College Assistive Robotics Contest: RoboWaiter Mark Smith, Electrical Engineering Aaron Griffin, Electrical Engineering Abstract Hardware Design Schematic for circuitry made in Eagle CAD • Custom chassis made from Lexan plastic with 3D printed base in center for actuator • Two motors and wheels, with encoders, propel robot with ball bearing as front pivot. • Grasping arms constructed from sheet aluminum, connected with metal rods to actuator. • Two servos with aluminum arms control the collection and release of plate. • Competition Objectives • Start robot once tone is detected • Find fridge marked with infrared LED • Open fridge by running over floor sensor • Grab correct plate from fridge • Run over floor sensor to close fridge • Transport plate to table marked with red LED • Return to starting point • Retrieve plate from table • Deliver to sink marked with blue LED • Return to start point The RoboWaiter Contest challenges teams to create a robot that can retrieve a plate of food and transport it to a table in a reliable and efficient manner. The arena simulates a home kitchen with the usual fixtures and a pair of dolls representing humans served by the robot. Any collisions with obstacles or walls will result in immediate disqualification. Super Snooper Big Ear Audio Amplifier for amplifying signal from microphone. Arena layout for 2014 Robowaiter competition. Results Software Design • The robot is controlled by an ATMEL8951 microcontroller • All code written in C • Two servos controlled by 8951 timer 0 and timer 1. • Actuator and motors operated through the 8951 programmed to work with H drivers. • Side Sharp distance sensor connected to 8951 by analog to digital converter port 0. • All other sensors are connected to comparators which feed into 8951 through basic I/0 ports. Wall finding routine The result of this project was a functional robot that could perform each individual task that was specified by the Robowaiter rules. Also our senior project provided a valuable experience in numerous aspects of electrical engineering, including hardware design, software development, budgeting, communication within the project’s team and overall project management. Wall following routine Finished build of RoboWaiter Special recognition and thanks to Mr. Jeff Cron and Dr. Marc Mitchell for advice in all aspects of the project.