Download
1 / 20
200 likes | 339 Views
Evaluation of the ground retracking algorithms on Jason-1 data. P.Thibaut, S. Labroue Collecte Localisation Satellite : Toulouse, France. All the results presented have been obtained on one cycle of Jason-1 data (cycle 20). GDR ‘B’ nominal Jason-1 products

E N D
Evaluation of the ground retracking algorithms on Jason-1 data P.Thibaut, S. Labroue Collecte Localisation Satellite : Toulouse, France
All the results presented have been obtained on one cycle of Jason-1 data (cycle 20) • GDR ‘B’ nominal Jason-1 products • Retracked files provided by JLP (same information than in Topex RGDRs • including LSE and MAP estimations) Objective • The objective of this presentation is to characterize the various retracking algorithms applied on Jason and Topex waveforms and to determine if they can be considered as responsible for differences observed between Jason and Topex SSB. • We decided to apply the various retracking on Jason-1 WFs. If no differences are observed when retracking the same waveforms, the differences between Topex and Jason SSB may directly come from the WFs (leakages on Topex WFs) Page 2
Characteristics of the 3 retracking algorithms MLE4 (nominal proc. for GDRs) : • Epoch, SWH, Pu, slope of the trailing edge : 20 estimations per second • Retracking a single gaussian + LUT which provide the correction between • one gaussian and the full real PTR (as a function of SWH) • Skewness ls set to 0.1 • Waveforms averaging (2x2 in Ku band, 4x4 in C band) before retracking • Decomposition of the PTR into a sum of Gaussians (for 20 side-lobes) • Epoch : 10 estimations per second in Ku (5 in C) • SWH, Pu, slope of the trailing edge : 1 estimation per second • ls : 1 estimation per second or fixed to 0 LSE Allows comparison to Topex LSE Allows comparison to Jason MLE4 (except that for Jason a 0.1 value is used) MAP • Idem LSE Page 3
Information provided by the various products JPL products provide: the retracked epoch (10 Hz and 1 Hz) (JPL = LSE or MAP) : EpochJPL GDR products provide: the range (20 Hz and 1Hz) : RangeGDR the tracker range (20Hz and 1 Hz) : TrackerGDR the Look Up Table correction for epoch (1Hz) : LUTGDR Comparison between JPL and GDR ranges is given by: DRange1Hz = RangeJPL_1Hz – RangeGDR_1Hz But we have only the EpochJPL DRange1Hz = TrackerGDR – EpochJPL – LUTGDR – RangeGDR_1Hz Page 4
Delta Range(LSE - GDR) versus (SWH and SIG0) No remaining dependancies with SWH or SIG0 in the bulk of the data Skewness solved Range_LSE-Range_GDR versus (SWH,SIG0) Skew solved 40 cm 50 cm Page 5
Delta Range(LSE - GDR) versus (SWH and ATT2) No remaining dependancies with SWH or ATT2 in the bulk of the data Skewness solved Range_LSE-Range_GDR versus (SWH,ATT) Skew solved 40 cm 50 cm Page 6
Delta Range(LSE - GDR) versus (SWH and SIG0 and ATT2) Dependances appear when the skewness is fixed but it was fixed to 0 (in GDR 0.1) Range_LSE-Range_GDR versus (SWH,ATT) Skew fixed Range_LSE-Range_GDR versus (SWH,SIG0) Skew fixed 40 cm 50 cm 40 cm 50 cm Page 7
Skewness solved LSE-GDR 50 cm DRange 45 cm • Very good agreement between LSE and MLE4 SWH ATT2 MAP-GDR 50 cm DRange 1%SWH • MAP introduces SWH and ATT dependances (Constraints on MAP skewness is too strong : ls=0) 45 cm SWH ATT2 Page 8
Delta Range(MAP - GDR) versus (SWH and SIG0 and ATT2) MAP introduces dependances but the skewness remains close to 0 (in GDR 0.1) Same kind of plot when skewness fixed at 0 Range_MAP-Range_GDR versus (SWH,ATT) Skew solved Range_MAP-Range_GDR versus (SWH,SIG0) Skew solved 40 cm 50 cm 40 cm 50 cm Page 9
Difference of range (LSE – MAP) -5cm +5cm Page 10
Skewness estimation Skewness is not estimated for SWH smaller than 1 m Skewness remains close to 0 for MAP LSE MAP Mean=0.06 Mean=0.001 Page 11
Skewness with respect to SWH Skewness is not estimated for SWH less than 1 m Skewness remains close to 0 for MAP LSE MAP Page 12
Statistics on ATT – Skewness Solved ATT_GDR ATT_LSE ATT_MAP Mean=0.003 Mean=0.001 Mean=0.001 DATT(LSE-GDR) DATT(MAP-GDR) Mean=-0.002 Mean=-0.003 Page 13
Statistics on SWH DSWH(LSE-GDR) DSWH(MAP-GDR) Mean=7.64 cm Mean=7.91 cm Skewness solved Mean=7.06 cm Mean=28.8 cm Skewness fixed Page 14
Jason-1 SLA Power Spectrum (see Faugere’s talk) • Very good coherence between Topex LSE5 and Jason MLE4 • Between MLE4 and LSE4, impact of 1HZ estimation for SWH, Pu and Att2 (skew fixed for both) • Between LSE4 andLSE5, impact of the estimation of a 5th parameter (ls) J1 LSE5 TP LSE5 • Between MLE4andLSE5, addition of the two previous effects (it has been shown that they are very close regarding the SSB) J1 MLE4 (GDRB) J1 LSE4 (fixed skew) Page 15
Conclusions • LSE and MLE4 algorithms are equivalent wrt SSB when skewness is solved for. • SSB differences between Topex and Jason • cannot be explained by differences in the • retracking algorithms • SSB differences lie in the WFs themselves • SWH biases (LSE) are still to be analysed • MAP is not yet ready to provide users with • reliable estimates Range_LSE-Range_GDR versus (SWH,SIG0) Skew solved Page 16
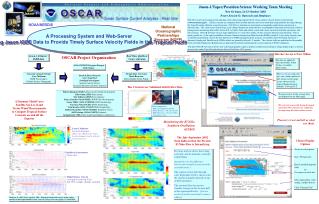
Vsat PRF-1 Nadir track Left swath Right swath Sea State Modelling Boost Waveform generation Starlab Interferometric Inversion CLS CLS Simulator of Interferometric Radar Altimeters concept and first results P. THIBAUT, B.PICARD : CLS, France, O.GERMAIN : Starlab, Spain, F.COLLARD : Boost-Technologies, France L.PHALIPPOU : Alcatel-Alenia-Space, FranceC.BUCK5 : ESTEC-ESA, The Netherlands
Sigma-0 blooms in the Envisat Radar Altimeter data P.THIBAUT, F.FERREIRA : CLS, France, P.FEMENIAS : ESA/ESRIN, Italy Which one is a bloom, which one is not ? Where are the egdes ? What are their length ? Where are they ? What about the waveforms during blooms ? What are the impact of blooms on ranges ? How many blooms are edited by Calval criteria? Which kind of criteria would be more useful ? …. Ideas, comments …. Come to talk with me. Page 20